Planificación de movimientos
-
MoveIt! es una librería de manipulación y planificación de movimientos que permite realizar tareas que requieran resolver cinemática inversa y directa, además de planificación de trayectorias.
-
La librería tiene un diseño modular y extensible, por lo que cada componente se puede reemplazar con facilidad, e incluye chequeo de colisiones y restricciones de movimiento fácilmente agregables.
-
Además, todo está integrado con ROS.
-
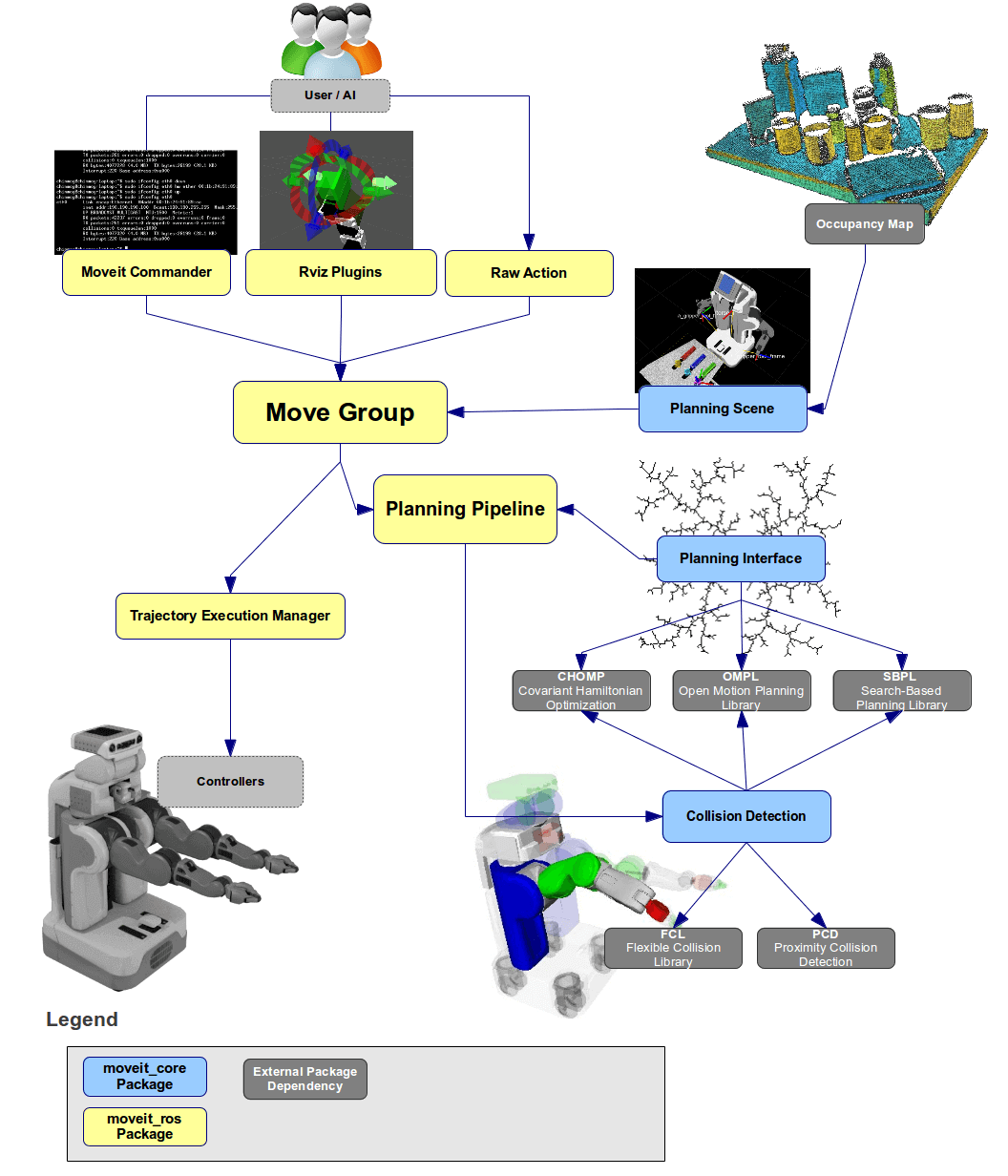
- Detalles sobre la implementación de MoveIt! en nuestro proyecto son disponibles con el ROS Graph en la sección ROS Graphs de este wiki (especialmente los nodos relacionados con
/move_group).
- Detalles sobre la implementación de MoveIt! en nuestro proyecto son disponibles con el ROS Graph en la sección ROS Graphs de este wiki (especialmente los nodos relacionados con
-
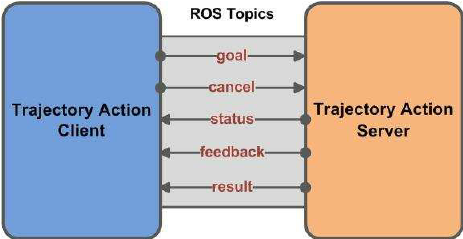
Usamos el Trajectory Execution Manager para ejecutar la trayectorias generadas por MoveIt! (enviando un
goal, y verificando la ejecución con elresult)
Los nodos relacionados con la planificación de movimientos y MoveIt! se ejecutan automáticamente al lanzamiento de la demo.
Si por algunas pruebas, necesita lanzar lo manualmente, en un terminal ejecuta:
roslaunch dual_ur3_moveit_config multiple_ur3_moveit_planning_execution.launch sim_VREP:=true
Para obtener una visualización en tiempo real con MoveIt!, ejecuta el comando siguiente en un nuevo Terminal:
roslaunch dual_ur3_moveit_config moveit_rviz.launch config:=true
- Las próximas versiones de ROS (ROS2 y ROS-I) permitirán gestionar la planificación simultanea de manera nativa, sin juntar todo en el mismo archivo
.URDFcomo hecho en nuestro proyecto.
- Sitio oficial de MoveIt! : https://moveit.ros.org/
- Informaciones ROS2: https://index.ros.org/doc/ros2/
- Informaciones ROS-I: https://rosindustrial.org/