Maquina de estados (SMACH)
-
Todas las tareas a realizar y el complejo comportamiento del robot se regulan gracias a una máquina de estado, que está disponible bajo el framework ROS como el paquete SMACH. Este paquete permite, igual que para procesos de automatización, lanzar varios códigos, llamados estados, dependiendo de las condiciones y del éxito (o no) de los estados anteriores, sin ningún acción del usuario.
-
Para más detalles, por favor consulte la sección Referencias de este wiki.
La figura siguiente muestra la arquitectura de la maquina de estados desarrollada.
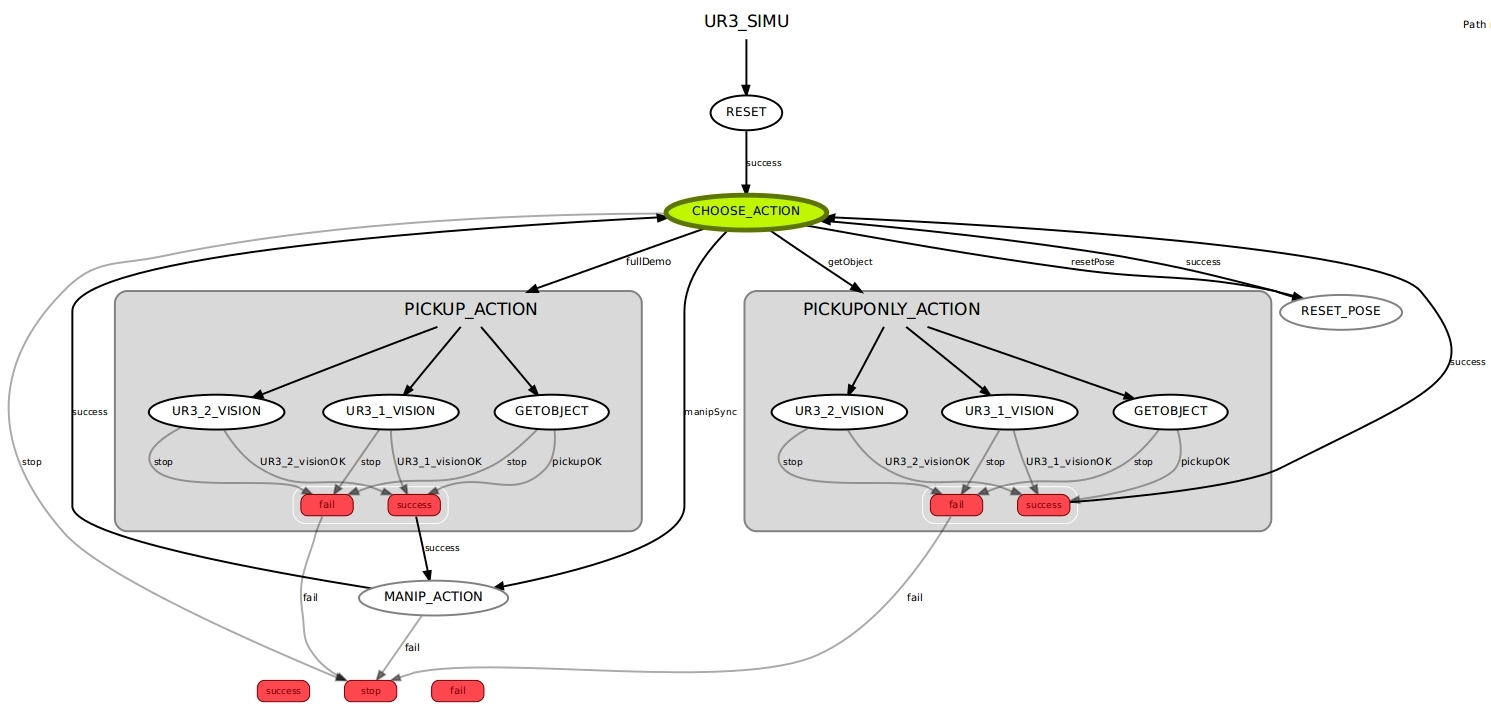
Las ellipses representan los nodos, o acciónes sucesivas, mientras que la flechas representan las transiciones entre las acciónes.
- El código se encuentra con el nombre
sm_ur3_simu_menu.py. - Se puede lanzarlo manualmente con
rosrun smach_ur3_simu sm_ur3_simu_menu.py
- SMACH ROS wiki: http://wiki.ros.org/smach