Manipulación conjunta
Ese paquete permite la manipulación conjunta de una caja.
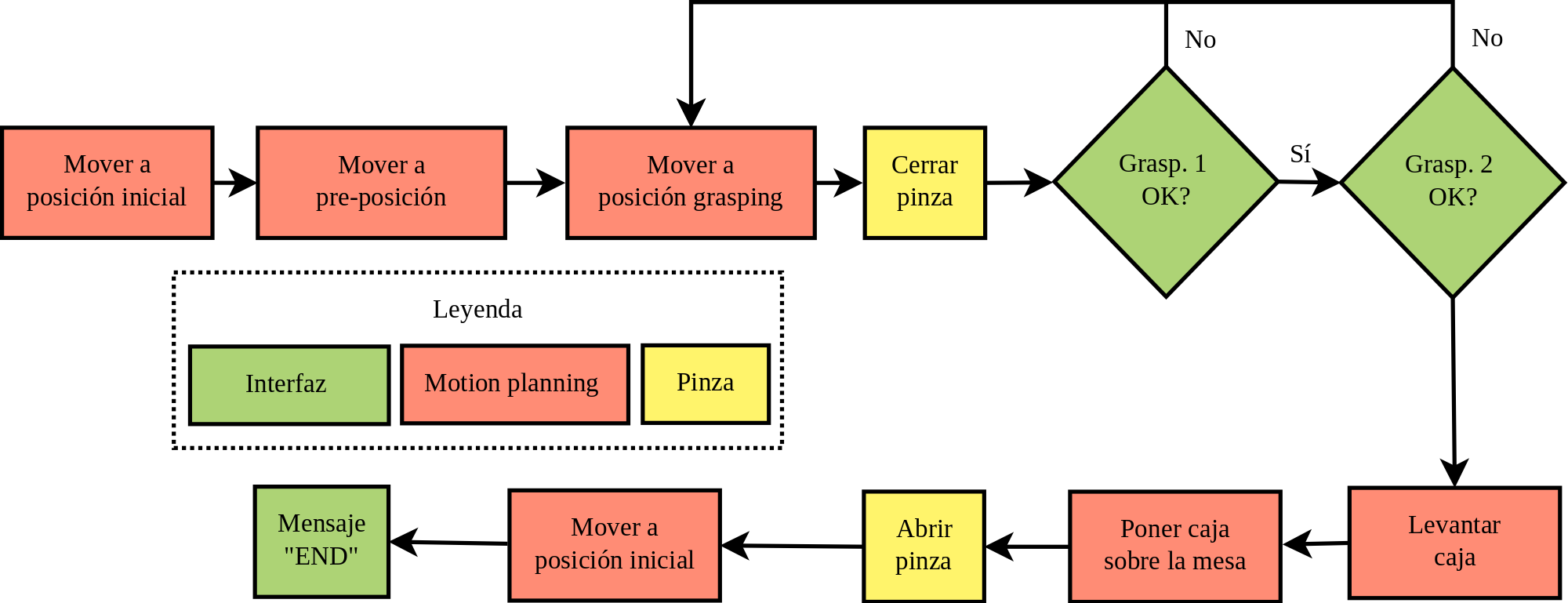
Los nodos de la manipulación se ejecutan automáticamente al lanzamiento de la demo.
Si por algunas pruebas, necesita lanzar lo manualmente, en un terminal ejecuta:
- (Manipulación automatizada)
rosrun cooperative_demo dual_ur3_motionPlanning_sync_ActionGoal_v2.py - (Step-by-step)
rosrun cooperative_demo dual_ur3_motionPlanning_sync_Steps.py
- Eso occure en los scripts de V-REP de las pinzas Robotiq85.
- Para la simulación del grasping, CoppeliaRobotics, el editor de V-REP, aconseja jugar con los diferentes parámetros disponibles en el simulador.
- Procedamos de la misma manera que por el grasping. También, modificamos el material de la caja y de los dedos por uno de alta fricción, asegurando un comportamiento correcto de la simulación.
- Proyecto
object-recognitionde apollack11 : https://github.com/apollack11/object-recognition