Grasping
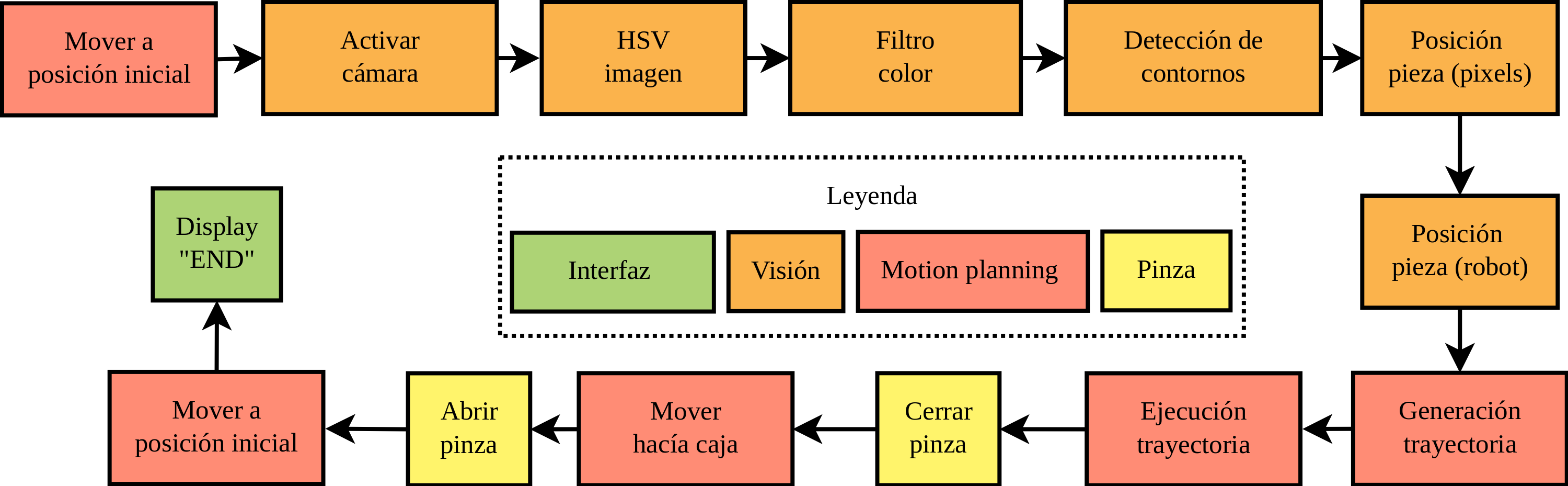
Ese paquete permite la detección de piezas en una mesa, detecta su pose en la mesa, gracias a un cámara y al entorno OpenCV, y luego la agarra.
-
Los nodos de las cámaras y del grasping se ejecutan automáticamente al lanzamiento de la demo.
-
Si por algunas pruebas, necesita lanzar lo manualmente, en un terminal ejecuta primero:
- (Visión UR3 #1)
$ rosrun cooperative_demo ur3_vision.py - (Visión UR3 #2)
$ rosrun cooperative_demo ur3_2_vision.py
- (Visión UR3 #1)
-
Luego en un otro terminal:
- (Manipulación automatizada)
rosrun cooperative_demo dual_ur3_getObject_sync_ActionGoal_v2.py - (Step-by-step)
rosrun cooperative_demo dual_ur3_getObject_sync_Steps.py
- (Manipulación automatizada)
- El tratamiento de los datos de las cámaras se realiza en el script
dual_ur3_getObject_sync_ActionGoal_v2.py- Verificar la calibración de la cámara virtual
- Mejorar los 'offsets' del programa
- Eso occure en los scripts de V-REP de las pinzas Robotiq85.
- Para la simulación del grasping, CoppeliaRobotics, el editor de V-REP, aconseja jugar con los diferentes parámetros disponibles en el simulador.
- De hecho, el tema del grasping en simulación sigue un tema sensible y difícil, ya que los motores de física lo gestionan bastante mal.
- Así, uno de los métodos lo más simples de implementación y con buenos resultados es el fake grasping. Cuando una pieza se detecta entre los dedos de la pinza, y que el contacto es establecido, los dedos y la pieza se ’fusionan’, en el sentido del simulador.
- Eso significa que pinza y pieza forman uno. Es un simplificación bastante importante con la física, pero eso garantiza un comportamiento en simulación correcto.
- Para más realidad, controlamos también la pinza en fuerza, antes de realizar el fake grasping, verificando que aplicamos una fuerza de 50 N entre los dedos de la pinza.
- Proyecto
object-recognitionde apollack11 : https://github.com/apollack11/object-recognition