This directory showcases the simulation stage for the TM-RRT Exploration using Gazebo and RVIZ.
The following code is executed in ROS Melodic in Ubuntu 18.04 LTS, Python 2.7
The following libraries are required to be installed before proceeding to run the code
$ sudo apt-get install ros-melodic-gmapping
$ sudo apt-get install ros-melodic-navigation
$ sudo apt-get install python-opencv
$ sudo apt-get install python-numpy
$ sudo apt-get install python-scikits-learn
$ sudo apt-get install ros-melodic-teb-local-planner
$ sudo apt-get install ros-melodic-multirobot-map-merge
Create a new folder called "catkin_explore/src" by executing the following comment:
$ sudo mkdir -p ~/catkin_explore/src
$ cd ~/catkin_explore/src/
$ git clone -b main-Melodic https://github.com/hikashi/TM-RRT_exploration_Simulation.git
$ cd ~/catkin_explore
$ catkin_make
In console one (for running small map):
$ roslaunch ros_3d_multitb3 multiple_tb3_house4.launch
In console one (for running big map):
$ roslaunch ros_3d_multitb3 multiple_tb3_house5.launch
In console two:
$ roslaunch tmrrt_exploration trio_exploration.launch
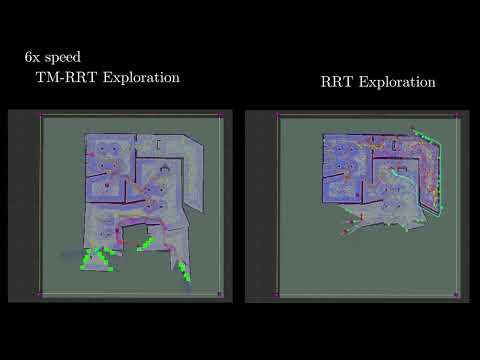
An example of the simulation can be shown in the following video: