forked from zivong/jekyll-theme-hydure
-
Notifications
You must be signed in to change notification settings - Fork 37
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
1 changed file
with
332 additions
and
0 deletions.
There are no files selected for viewing
332 changes: 332 additions & 0 deletions
332
_posts/2023-12-11-Reinforcement-Learning-for-Robotics.md
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,332 @@ | ||
| --- | ||
| layout: post | ||
| title: Reinforcement Learning for Robotics | ||
| author: [Richard Kuo] | ||
| category: [Lecture] | ||
| tags: [jekyll, ai] | ||
| --- | ||
|
|
||
| Introduction to Reinforcement Learning for Robot / Drone. | ||
|
|
||
| --- | ||
| ## AI-Robots | ||
|
|
||
| ### Figure AI | ||
| <iframe width="999" height="562" src="https://www.youtube.com/embed/tpp8cykrauk" title="圖 01 OpenAI + 微軟的人工智能機器人更新令科技界震驚" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### Sanctuary AI | ||
| <iframe width="999" height="562" src="https://www.youtube.com/embed/SvlHlf1weYw" title="Sanctuary AI Teleoperation Explanatory Video for General-Purpose Robots" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### ADAM | ||
| **Paper:** [ADAM: a robotic companion for enhanced quality of life in aging populations](https://www.frontiersin.org/articles/10.3389/fnbot.2024.1337608/full)<br> | ||
| <iframe width="999" height="562" src="https://www.youtube.com/embed/bWg8qwCe4K0" title="新型模塊化人工智能機器人技術變得更加瘋狂(谷歌 DeepMind 的 RoboTool)" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ## Embodied AI | ||
| **Blog:** [Overview of Embodied Artificial Intelligence](https://medium.com/machinevision/overview-of-embodied-artificial-intelligence-b7f19d18022)<br> | ||
| Embodied AI is the field for solving AI problems for virtual robots that can move, see, speak, and interact in the virtual world and with other virtual robots — these simulated robot solutions are then transferred to real world robots<br> | ||
| The simulated environments for Embodied AI training: SUNCG, Matterport3D, iGibson, Replica, Habitat, and DART<br> | ||
|
|
||
| --- | ||
| ### Matterport3D | ||
| **Paper:** [Matterport3D: Learning from RGB-D Data in Indoor Environments](https://arxiv.org/abs/1709.06158)<br> | ||
| **Code:** [Matterport3D](https://github.com/niessner/Matterport)<br> | ||
|
|
||
|  | ||
|
|
||
| --- | ||
| ### Replica | ||
| **Code:** [Replica Dataset](https://github.com/facebookresearch/Replica-Dataset)<br> | ||
|  | ||
|
|
||
| --- | ||
| ### iGibson | ||
| **Paper:** [iGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks](https://arxiv.org/abs/2108.03272)<br> | ||
| **Code:** [StanfordVL/iGibson](https://github.com/StanfordVL/iGibson)<br> | ||
|  | ||
|
|
||
| --- | ||
| ### Habitat 2.0 | ||
| **Paper:** [Habitat 2.0: Training Home Assistants to Rearrange their Habitat](https://arxiv.org/abs/2106.14405)<br> | ||
| **Code:** [facebookresearch/habitat-sim](https://github.com/facebookresearch/habitat-sim)<br> | ||
| <video controls> | ||
| <source src="https://user-images.githubusercontent.com/2941091/126080914-36dc8045-01d4-4a68-8c2e-74d0bca1b9b8.mp4" type="video/mp4"> | ||
| </video> | ||
|
|
||
| --- | ||
| ## Indoor Navigation | ||
|
|
||
| ### Autonomous Indoor Robot Navigation | ||
| **Paper:** [Deep Reinforcement learning for real autonomous mobile robot navigation in indoor environments](https://arxiv.org/abs/2005.13857)<br> | ||
| **Code:** [](https://github.com/RoblabWh/RobLearn)<br> | ||
| <iframe width="742" height="417" src="https://www.youtube.com/embed/KyA2uTIQfxw" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|  | ||
|
|
||
| --- | ||
| ### DDPG 路徑規劃 | ||
| **Blog:** [智慧送餐服務型機器人導航路徑之設計](https://www.phdbooks.com.tw/cn/magazine/detail/1225)<br> | ||
| 路徑跟隨器有四個主軸:<br> | ||
| * 送餐路徑生成:從文件或上層發佈訊息獲取預先定義的路徑。 | ||
| * 編輯航線路徑點:清除路徑中不合適的航線路徑點。 | ||
| * MFAC無模型自適應控制之航段管制:自動調整送餐路徑之導航點之間的航段長度,依序共分成路徑跟隨之依據以及MFAC無模型自適應控制之應用。 | ||
| * DWA之區域路徑傳遞:依照MFAC調整之結果,產出相關生成路徑,並以DWA進行區域設定。 | ||
|
|
||
| * **自走車基於DDPG的室內路徑規劃**<br> | ||
| <iframe width="506" height="285" src="https://www.youtube.com/embed/TNRjb8q6XxM" title="自走車基於DDPG的室內路徑規劃" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### Long-Range Indoor Navigation | ||
| **Paper:** [Long-Range Indoor Navigation with PRM-RL](https://arxiv.org/abs/1902.09458)<br> | ||
| <iframe width="742" height="417" src="https://www.youtube.com/embed/xN-OWX5gKvQ" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|  | ||
|
|
||
| --- | ||
| ## Gym-Gazebo | ||
| **Code:** [erlerobot/gym-gazebo](https://github.com/erlerobot/gym-gazebo)<br> | ||
| <table> | ||
| <tr> | ||
| <td><img src="https://github.com/erlerobot/gym-gazebo/raw/master/imgs/GazeboCircuit2TurtlebotLidar-v0.png"></td> | ||
| <td><img src="https://github.com/erlerobot/gym-gazebo/raw/master/imgs/cartpole.jpg"></td> | ||
| <td><img src="https://github.com/erlerobot/gym-gazebo/raw/master/imgs/GazeboModularScara3DOF-v3.png"></td> | ||
| </tr> | ||
| </table> | ||
|
|
||
| --- | ||
| ## DART (Dynamic Animation and Robotics Toolkit) | ||
|
|
||
| ### [Dartsim/dart](https://github.com/dartsim/dart) | ||
| * Python bindings: dartpy, pydart2 (deprecated) | ||
| * OpenAI Gym with DART support: gym-dart (dartpy based), DartEnv (pydart2 based, deprecated) | ||
|
|
||
| <iframe width="742" height="417" src="https://www.youtube.com/embed/Ve_MRMTvGX8" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ## [PyBullet-Gym](https://github.com/benelot/pybullet-gym) | ||
| [PyBullet Quickstart Guide](https://docs.google.com/document/d/10sXEhzFRSnvFcl3XxNGhnD4N2SedqwdAvK3dsihxVUA/edit#heading=h.2ye70wns7io3)<br> | ||
|
|
||
| **code:** [rkuo2000/pybullet-gym](https://github.com/rkuo2000/pybullet-gym)<br> | ||
| * installation | ||
| ``` | ||
| pip install gym | ||
| pip install stable-baselines3 | ||
| git clone https://github.com/rkuo2000/pybullet-gym | ||
| export PYTHONPATH=$PATH:/home/yourname/pybullet-gym | ||
| ``` | ||
|
|
||
| **Train**<br> | ||
| `python train.py Ant 10000000`<br> | ||
|
|
||
| **Enjoy** with trained-model<br> | ||
| `python enjoy.py Ant`<br> | ||
|
|
||
| **Enjoy** with pretrained weights<br> | ||
| `python enjoy_Ant.py`<br> | ||
| `python enjoy_HumanoidFlagrunHarder.py` (a copy from pybulletgym/examples/roboschool-weights/enjoy_TF_*.py)<br> | ||
|
|
||
| --- | ||
| ### [PyBullet-Robots](https://github.com/erwincoumans/pybullet_robots) | ||
| <img width="50%" height="50%" src="https://raw.githubusercontent.com/erwincoumans/pybullet_robots/master/images/collection.png"> | ||
|
|
||
| **env_name = "AtlasPyBulletEnv-v0"**<br> | ||
| [atlas_v4_with_multisense.urdf](https://github.com/benelot/pybullet-gym/blob/master/pybulletgym/envs/assets/robots/atlas/atlas_description/atlas_v4_with_multisense.urdf)<br> | ||
| <iframe width="580" height="435" src="https://www.youtube.com/embed/aqAk701ylIk" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ## RoboCar Gym | ||
|
|
||
| ### Pybullet-RoboCar | ||
| **Blog:** <br> | ||
| [Creating OpenAI Gym Environments with PyBullet (Part 1)](https://gerardmaggiolino.medium.com/creating-openai-gym-environments-with-pybullet-part-1-13895a622b24)<br> | ||
| [Creating OpenAI Gym Environments with PyBullet (Part 2)](https://gerardmaggiolino.medium.com/creating-openai-gym-environments-with-pybullet-part-2-a1441b9a4d8e)<br> | ||
|  | ||
|
|
||
| --- | ||
| ## Quadruped Gym | ||
|
|
||
| ### [Motion Imitation](https://github.com/google-research/motion_imitation) | ||
| **Code:** [TF 1.15](https://github.com/google-research/motion_imitation)<br> | ||
| <iframe width="784" height="441" src="https://www.youtube.com/embed/NPvuap-SD78" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
| **Code:** [PyTorch](https://github.com/newera-001/motor-system)<br> | ||
| For Training:<br> | ||
| `python motion_imitation/run_torch.py --mode train --motion_file 'dog_pace.txt|dog_spin.txt' \ | ||
| --int_save_freq 10000000 --visualize --num_envs 50 --type_name 'dog_pace'`<br> | ||
| For Testing:<br> | ||
| `python motion_imitation/run_torch.py --mode test --motion_file 'dog_pace.txt' --model_file 'file_path' \ | ||
| --encoder_file 'file_path' --visualize`<br> | ||
|
|
||
| --- | ||
| ### Rex: an open-source quadruped robot | ||
| **Code:** [nicrusso7/rex-gym](https://github.com/nicrusso7/rex-gym)<br> | ||
|  | ||
|
|
||
| --- | ||
| ## Drones Gym | ||
|
|
||
| ### [PyBullet-Gym for Drones](https://github.com/utiasDSL/gym-pybullet-drones) | ||
|  | ||
|  | ||
|
|
||
| * Installation | ||
| ``` | ||
| sudo apt install ffmpeg | ||
| pip install numpy pillow matplotlib cycler | ||
| pip install gym pybullet stable_baselines3 ray[rllib] | ||
| git clone https://github.com/rkuo2000/gym-pybullet-drones.git | ||
| cd gym-pybullet-drones | ||
| ``` | ||
|
|
||
| * Train & Enjoy<br> | ||
| `python train.py` # modify train.py for different env, algorithm and timesteps<br> | ||
| `python enjoy.py` # modify enjoy.py for different env<br> | ||
|
|
||
| * Fly using [DSLPIDControl.py](https://github.com/utiasDSL/gym-pybullet-drones/blob/master/gym_pybullet_drones/control/DSLPIDControl.py):(PID飛行)<br> | ||
| `python examples/fly.py --num_drones 1`<br> | ||
|  | ||
|
|
||
| * To learn take-off:(起飛) <br> | ||
| `python examples/learn.py`<br> | ||
|  | ||
|
|
||
| * `compare.py` which replays and compare to a trace saved in `files/example_trace.pkl` | ||
|
|
||
| **Experiments**<br> | ||
| `cd experiments/learning`<br> | ||
|
|
||
| env : hover, takeoff, flythrugate, tune(旋停, 起飛, 穿越, 調整)<br> | ||
| algo: a2c, ppo, sac, td3, ddpg<br> | ||
|
|
||
| * To learn hover:(旋停)<br> | ||
| `python singleagent.py --env hover --algo a2c`<br> | ||
|
|
||
| To visualize the best trained agent:<br> | ||
| `python test_singleagent.py --exp ./results/save-hover-a2c`<br> | ||
|
|
||
| For multi-agent RL, using rllib:<br> | ||
| `python multiagent.py --num_drones 3 --env hover --algo a2c --num_workers 2`<br> | ||
|
|
||
| --- | ||
| ### [Flightmare](https://github.com/uzh-rpg/flightmare) | ||
| Flightmare is a flexible modular quadrotor simulator. | ||
| <iframe width="768" height="432" src="https://www.youtube.com/embed/m9Mx1BCNGFU" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
| <img width="50%" height="50%" src="https://github.com/uzh-rpg/flightmare/raw/master/docs/flightmare.png"> | ||
| * [Introduction](https://github.com/uzh-rpg/flightmare/wiki/Introduction) | ||
| * [Prerequisites](https://github.com/uzh-rpg/flightmare/wiki/Prerequisites) | ||
| * [Install Python Packages](https://github.com/uzh-rpg/flightmare/wiki/Install-with-pip) | ||
| * [Install ROS](https://github.com/uzh-rpg/flightmare/wiki/Install-with-ROS) | ||
|
|
||
| * **running ROS** | ||
| ``` | ||
| roslaunch flightros rotors_gazebo.launch | ||
| ``` | ||
|
|
||
| * **flighRL**<br> | ||
| ``` | ||
| cd /path/to/flightmare/flightrl | ||
| pip install . | ||
| cd examples | ||
| python3 run_drone_control.py --train 1 | ||
| ``` | ||
|
|
||
| --- | ||
| ### [AirSim](https://github.com/microsoft/AirSim) | ||
| <iframe width="768" height="448" src="https://www.youtube.com/embed/-WfTr1-OBGQ" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|  | ||
|
|
||
| --- | ||
| ## Assistive Gym | ||
|
|
||
| **Paper:** [Assistive Gym: A Physics Simulation Framework for Assistive Robotics](https://arxiv.org/abs/1910.04700)<br> | ||
|  | ||
| <iframe width="705" height="397" src="https://www.youtube.com/embed/EFKqNKO3P60" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| * Four collaborative robots (PR2, Jaco, Baxter, Sawyer)<br> | ||
|  | ||
|
|
||
| * Support for the Stretch and PANDA robots<br> | ||
| <table> | ||
| <tr> | ||
| <td><img src="https://github.com/Healthcare-Robotics/assistive-gym/blob/main/images/v1_stretch.jpg?raw=true"></td> | ||
| <td><img src="https://github.com/Healthcare-Robotics/assistive-gym/blob/main/images/v1_panda.jpg?raw=true"></td> | ||
| </tr> | ||
| </table> | ||
|
|
||
| **Code:** [Healthcare-Robotics/assistive-gym](https://github.com/Healthcare-Robotics/assistive-gym)<br> | ||
|
|
||
| --- | ||
| ### Assistive VR Gym | ||
| **Paper:** [Assistive VR Gym: Interactions with Real People to Improve Virtual Assistive Robots](https://arxiv.org/abs/2007.04959)<br> | ||
| **Code:** [Healthcare-Robotics/assistive-vr-gym](https://github.com/Healthcare-Robotics/assistive-vr-gym)<br> | ||
|  | ||
| <iframe width="705" height="397" src="https://www.youtube.com/embed/tcyPMkAphNs" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ## Learning Dexity | ||
| <iframe width="696" height="392" src="https://www.youtube.com/embed/jwSbzNHGflM" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### [Dexterous Gym](https://github.com/henrycharlesworth/dexterous-gym) | ||
|  | ||
|  | ||
|
|
||
| --- | ||
| ### [DexPilot](https://research.nvidia.com/publication/2020-05_dexpilot-vision-based-teleoperation-dexterous-robotic-hand-arm-system) | ||
| **Paper:** [DexPilot: Vision Based Teleoperation of Dexterous Robotic Hand-Arm System](https://arxiv.org/abs/1910.03135)<br> | ||
|  | ||
| <iframe width="883" height="497" src="https://www.youtube.com/embed/qGE-deYfb8I" title="dexpilot highlights" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### [TriFinger](https://sites.google.com/view/trifinger) | ||
| <iframe width="464" height="287" src="https://www.youtube.com/embed/RxkS6dzO1dU" title="Writing" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| **Paper:** [TriFinger: An Open-Source Robot for Learning Dexterity](https://arxiv.org/abs/ | ||
| 2008.03596)<br> | ||
|  | ||
|  | ||
|  | ||
|
|
||
| **Code:** [TriFinger Robot Simulation](https://github.com/open-dynamic-robot-initiative/trifinger_simulation)<br> | ||
| <iframe width="736" height="410" src="https://www.youtube.com/embed/V767AGlyDOs" title="CoRL 2020, Spotlight Talk 421: TriFinger: An Open-Source Robot for Learning Dexterity" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### [Multi-Task Reset-Free (MTRF) Learning](https://sites.google.com/view/mtrf) | ||
| **Paper:** [Reset-Free Reinforcement Learning via Multi-Task Learning: Learning Dexterous Manipulation Behaviors without Human Intervention](https://arxiv.org/abs/2104.11203)<br> | ||
| <iframe width="562" height="296" src="https://www.youtube.com/embed/64FLPhvqgrw" title="MTRF Overview: Reset-Free Reinforcement Learning via Multi-Task Learning" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### Dexterous Anthropomorphic Robotic Hand | ||
| **Blog:** [Robotic hand can crush beer cans and hold eggs without breaking them](https://www.newscientist.com/article/2301641-robotic-hand-can-crush-beer-cans-and-hold-eggs-without-breaking-them/)<br> | ||
|  | ||
|
|
||
| **Paper:** [Integrated linkage-driven dexterous anthropomorphic robotic hand](https://www.nature.com/articles/s41467-021-27261-0#Abs1)<br> | ||
| 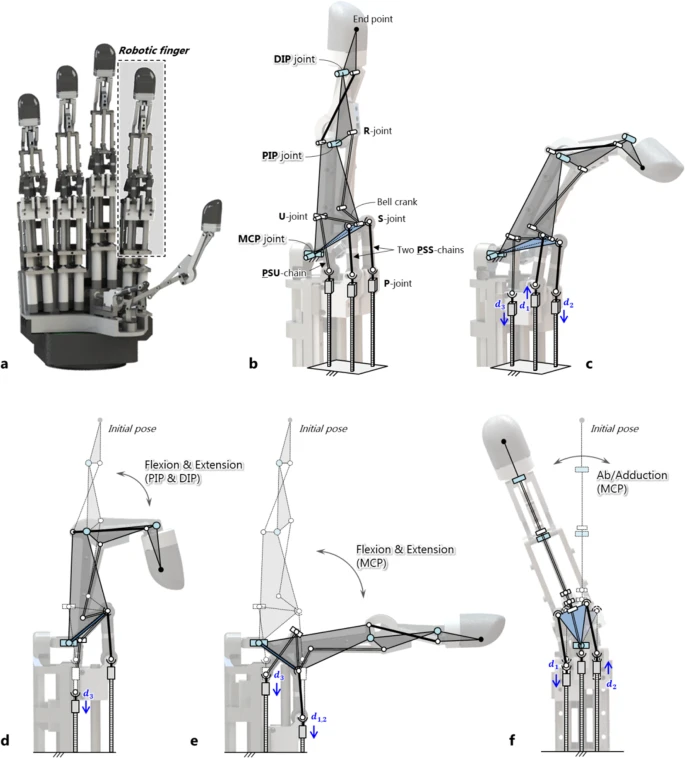 | ||
|
|
||
| <iframe width="883" height="497" src="https://www.youtube.com/embed/TJzfgipEACU" title="Watch a highly dexterous robotic hand use scissors and tweezers" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### Robotic Telekinesis | ||
| [Robotic Telekinesis: Learning a Robotic Hand Imitator by Watching Humans on Youtube](https://arxiv.org/abs/2202.10448)<br> | ||
| <iframe width="883" height="497" src="https://www.youtube.com/embed/fVrcBY0lOWw" title="Finally, Robotic Telekinesis is Here! 🤖" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### Fixed-Finger Gripper | ||
| **Paper:** [F1 Hand: A Versatile Fixed-Finger Gripper for Delicate Teleoperation and Autonomous Grasping](https://arxiv.org/abs/2205.07066)<br> | ||
| <iframe width="884" height="497" src="https://www.youtube.com/embed/iWXXIX4Mkl8" title="F1 Hand: A Versatile Fixed-Finger Gripper for Delicate Teleoperation and Autonomous Grasping" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### Learning Diverse Dexterous Grasps | ||
| **Paper:** [Learning Diverse and Physically Feasible Dexterous Grasps with Generative Model and Bilevel Optimization](https://arxiv.org/abs/2207.00195)<br> | ||
| <iframe width="883" height="497" src="https://www.youtube.com/embed/9DTrImbN99I" title="Learning Diverse & Physically Feasible Dexterous Grasps w/ Generative Model and Bilevel Optimization" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> | ||
|
|
||
| --- | ||
| ### ViLa | ||
| **Blog:** [https://bangqu.com/9Fa2ra.html](https://bangqu.com/9Fa2ra.html)<br> | ||
|  | ||
|
|
||
| <br> | ||
| <br> | ||
|
|
||
| *This site was last updated {{ site.time | date: "%B %d, %Y" }}.* | ||
|
|
||
|
|