
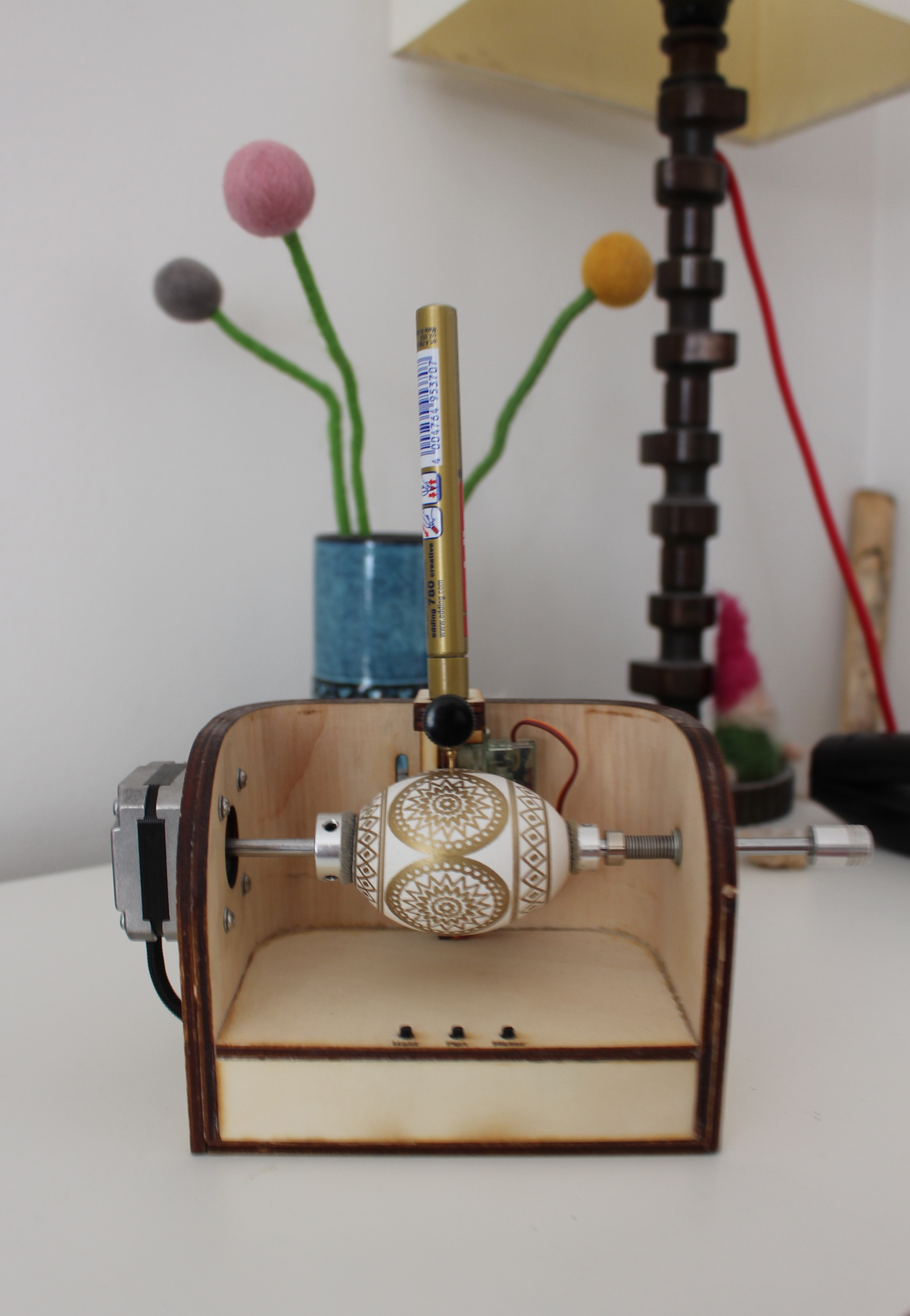


Arduino Firmware for Eggbot / Spherebot with Inkscape-Integration
Forked and heavily modified from https://github.com/cocktailyogi/EggDuino.
The aim of this fork is to allow hackers to easily add their own hardware/tweaks.
- Click the github 'Clone or Download' button, then 'Download ZIP'
- Extract the ZIP
- Rename the extracted folder into 'EggDuino'
- Open 'EggDuino.ino' using the Arduino IDE
- Install the 'VarSpeedServo' library
- Build & upload firmware
- Click the github 'Clone or Download' button, then 'Download ZIP'
- Extract the ZIP
- Build: 'platformio run'
- Upload firmware: 'platformio run --target upload'
The default implementation 'EBBHardware' is designed for:
- arduino nano + cnc shield or similar
- optional: autoreset disabled (See Troubleshooting section)
- 2x A4988, 1/16 microstepping stepper motor driver
- 2x nema 17 stepper motors for the rotation and pen axes
- 1x standard rc micro servo for the pen up/down
- 3x optional buttons (abort, toggle pen up/down, enable motors)
If your hardware is based on similar specs, you just need to edit 'config.h' and check the Arduino pin assignments.
- Install Inkscape 0.91 (0.92 has no cancel buttons)
- Install the Eggbot extension:
http://wiki.evilmadscientist.com/Installing_software
- The Eggduino cannot be detected by default, but we can fix it on our own:
- Go to your Inkscape-Installationfolder and navigate to subfolder .\App\Inkscape\share\extensions
- Open File "ebb_serial.py" in a texteditor
- In the 'findPort()' function, search the line:
"if port[2].startswith("USB VID:PID=04D8:FD92"):"
- Replace "04D8:FD92" by your arduino VID:PID usb identifier (e.g arduino nano clone "USB VID:PID=1A86:7523")
- In the 'testPort()' function, search the line:
serialPort = serial.Serial( comPort, timeout=1.0 ) # 1 second timeout!
- Replace "timeout=1.0" by "timeout=2.0"
- Save the file.
The main file is EBBParser: it's a c++ interface responsible for parsing the 'EBB EggBot' protocol and dispatch the work to different functions. Alone, it does nothing and should not need any modification.
The real work is done in the derived class EBBHardware: it implement the necessary functions declared in EBBParser. The list of functions you need to implement are declared in 'EBBParser.h'. The one ending with '= 0' (virtual pure) are mandatory and generates compilation errors if not implemented, the one without are optional, depends only on what features you are interested in.
MyEggDuino.h: This minimal implementation does nothing.
#include "EBBParser.h"
class MyEggDuino : public EBBParser {
public:
MyEggDuino(Stream& stream);
virtual void enableMotor(int axis, bool state)
{
}
virtual void stepperMove(int duration, int numPenSteps, int numRotSteps)
{
}
virtual void setPenState(bool up, short delayMs)
{
}
virtual bool getPenState()
{
return true;
}
virtual void setPenUpPos(int percent)
{
}
virtual void setPenDownPos(int percent)
{
}
virtual void setServoRateUp(int percentPerSecond)
{
}
virtual void setServoRateDown(int percentPerSecond)
{
}
virtual bool getPrgButtonState()
{
return false;
}
virtual void setPinOutput(char port, int pin, int value)
{
}
virtual void setEngraverState(bool state, int power)
{
}
};
EggDuino.ino
#include "MyEggDuino.h"
MyEggDuino ebb(Serial);
void setup()
{
Serial.begin(9600);
ebb.init();
}
void loop()
{
ebb.processEvents();
}
The arduino is auto reset when a serial communication is initialized. This is an Arduino feature for automatic firmware upload. This is a problem since the EggBot inkscape plugin sometime re-initialize the serial communication, breaking the current paint job. To prevent this autoreset, you need to solder a 10uF capacitor between RST and GND pin of the arduino, or google 'Disabling Auto Reset On Serial Connection' for alternatives.