#MewPro4
Arduino BacPac™ for GoPro Hero 4 Black/Silver: GoPro can be controlled by ATtiny1634 attached on Herobus.
Resources:
-
How To Use MewPro 2 and Application (This is an old documentation for GoPro Hero 3+ Black support, however, the installation procedure is the same to the application): [https://mewpro.cc/2015/06/29/how-to-use-mewpro-2-and-application/]
-
Schematic Drawing of MewPro 2 board: [https://mewpro.cc/wp-content/uploads/MewPro2.pdf]
###Prerequisites
In order to use MewPro 2 as a Hero 4 Black/Silver controller you need the following hardwares:
- GoPro Hero 4 Black/Silver
- MewPro 2
- Temporary FTDI Header (included in MewPro 2 package)
- Sparkfun FTDI Basic Breakout - 3.3V and USB cable
- Use 3.3V version of the breakout board. Any pin compatible board should work.
Softwares:
MewPro 2 is shipped with optiboot as well as MewPro4 software for genlocking. But if you like to modify/update the software you will need to prepare the following IDE, core. To install each software please refer their documentations.
- Arduino IDE 1.6.12 or newer
- Older versions of Arduino IDE might work but we don't confirm that.
- ATtiny Core
- 1634, x313, x4, x41, x5, x61, x7, x8 and 828 for Arduino 1.6.x
(A modified WireS library is distributed with MewPro 4 source code package, so you don't need to download the original version separately.)
Lastly grab the MewPro4 application:
- MewPro4 Application
- This is an open source software (MIT license). You can modify and distribute it as you like.
###Connections
On your PC launch Arduino IDE that was installed as described in the above. In Arduino IDE [File]→[Open...]→ then open MewPro4.ino.
Connect MewPro 2
!(http://mewpro.cc/wp-content/uploads/connection2.jpg)
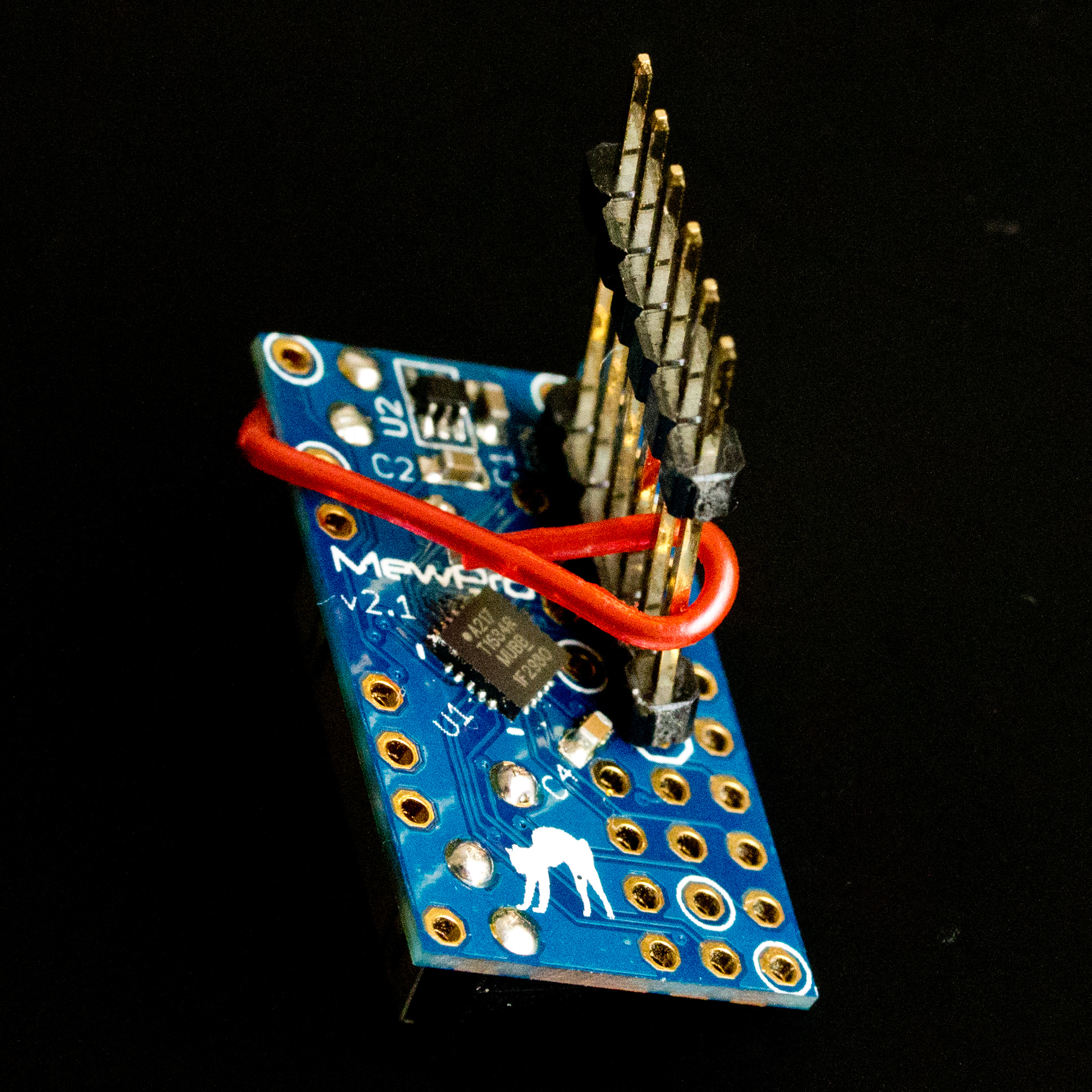{kind=link}
to your PC with FTDI board and the temporary header.
!(http://mewpro.cc/wp-content/uploads/conne2.jpg)
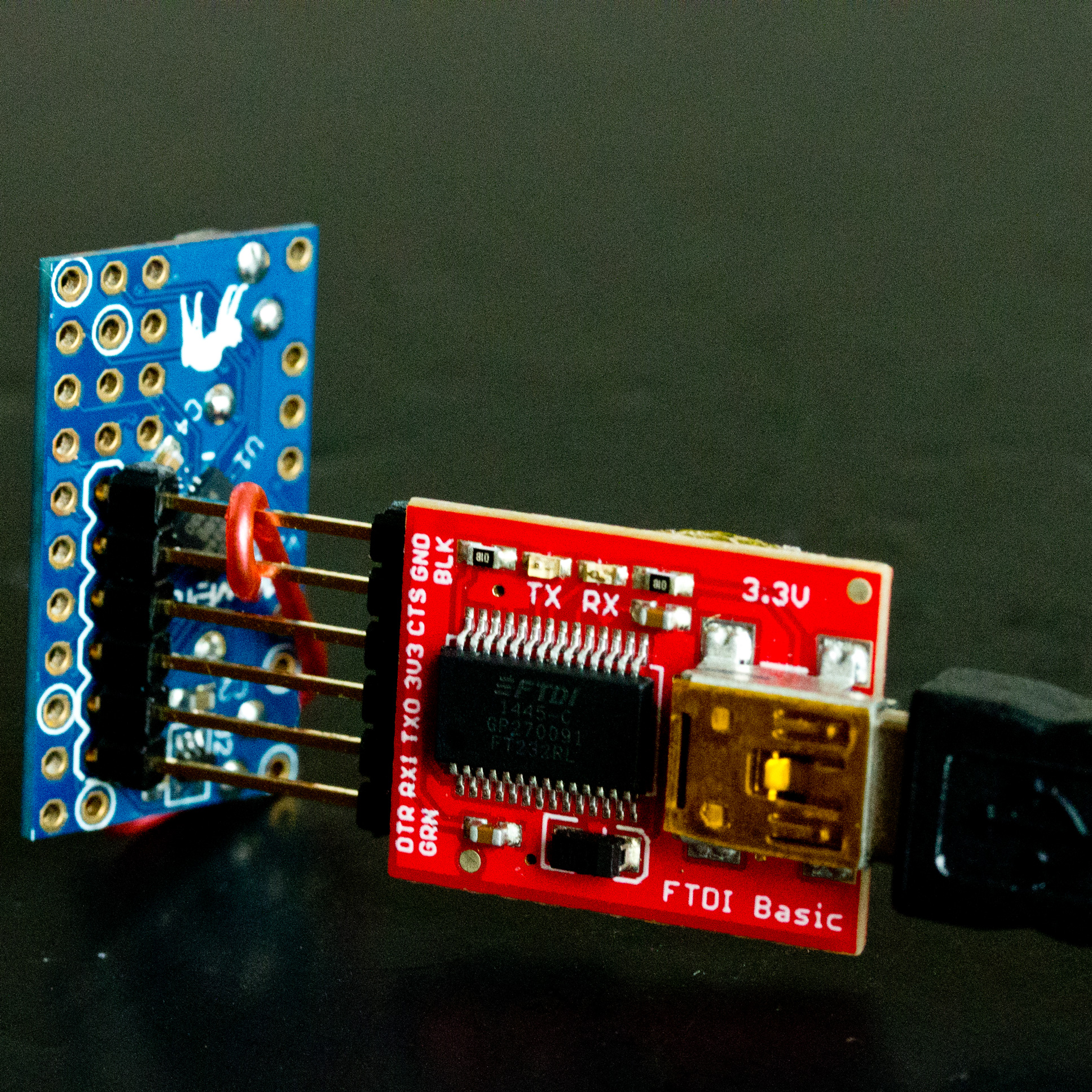{kind=link}
Connecting FTDI please refer the pinout image below:
!(http://mewpro.cc/wp-content/uploads/MewPro2.jpg)
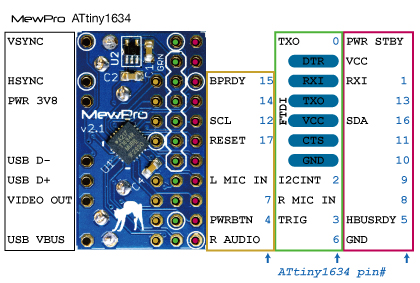{kind=link}
Then connect them to GoPro Hero 4 Black/Silver.
!(http://mewpro.cc/wp-content/uploads/conne1.jpg)
{kind=link}
In Arduino IDE application, select [Tools]→[Board]→[ATTiny1634 (optiboot)] and [Tools]→[Port]→[(the port where you connected the FTDI cable)]. (B.O.D. and Clock settings are “don’t care” as these values are only effective when you burn a bootloader to the microcontroller by using an ISP programmer.)
MewPro4 source code is targeted to MewPro 2 board, genlocking with Iliad, and Hero 4 Black/Silver firmware version v3.0.0 or later (please note v4.0.0 and/or v5.0.0 has a fatal bug in bulk setting transfer). So the code should be complied successfully without any modifications. Click "Verify" the MewPro4 sketch and "Upload" it to MewPro 2 board.