{kind=link}
#About
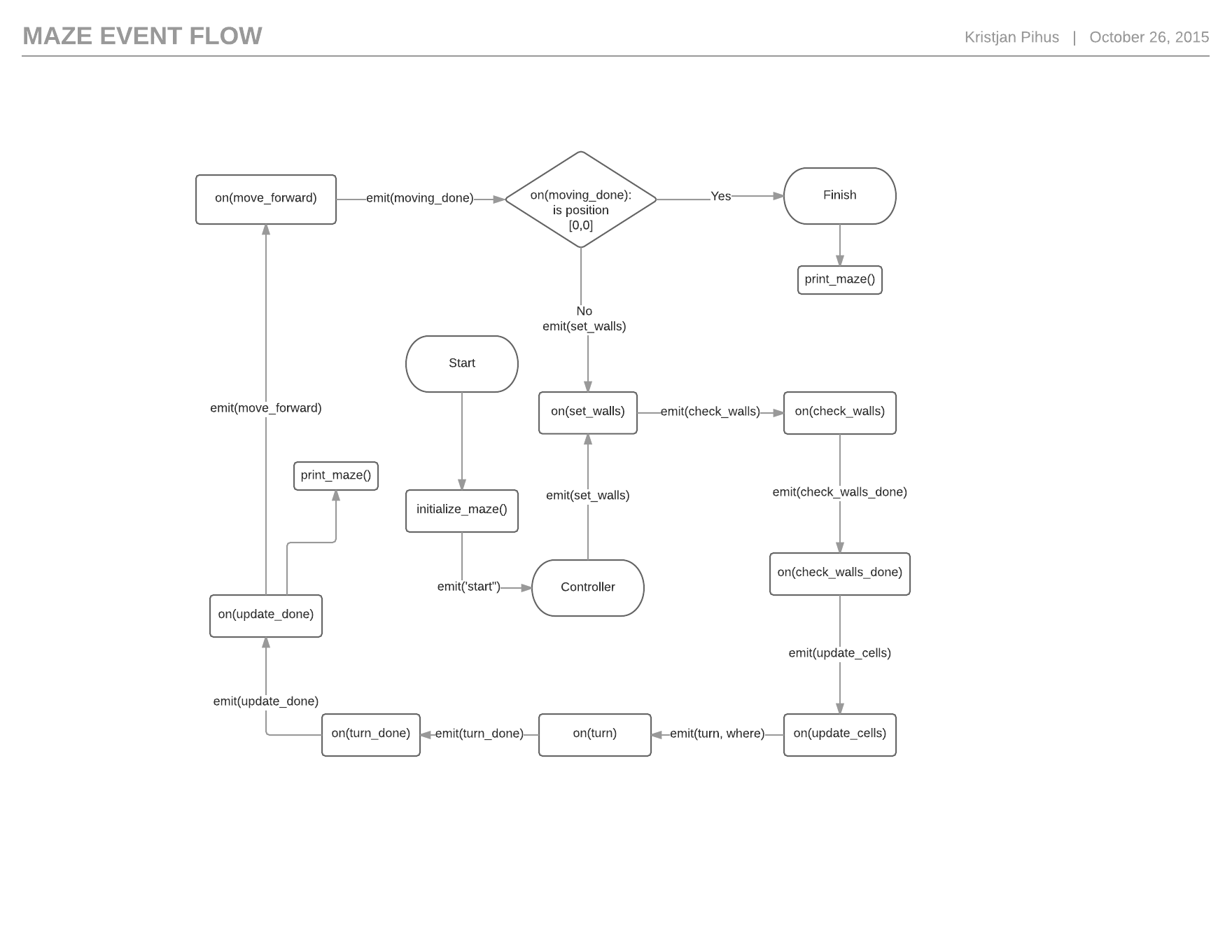
Implementation of maze solving task with Pololu 3pi and Tessel
#Serial commands
Both motors forward: (0xC8, speedLeft[0-127], speedRight[0-127]) Both motors backward: (0xC7, speedLeft[0-127], speedRight[0-127]) Right motor forward: (0xC2, speed[0-127]) Left motor forward: (0xC6, speed[0-127]) Get encoder readings(and clear in 3pi): (0xB7) Get encoder readings: (0xB8)