Most experimental AI/robotics research involves a simulation component. Typical simulations involve very simplified environments - often 2D environments with polygonal objects and circular robots. The aim of this project is to create a tool for higher-fidelity real-time simulations of autonomous mobile robots. Real-time simulation also allows hardware-in-the-loop simulations.
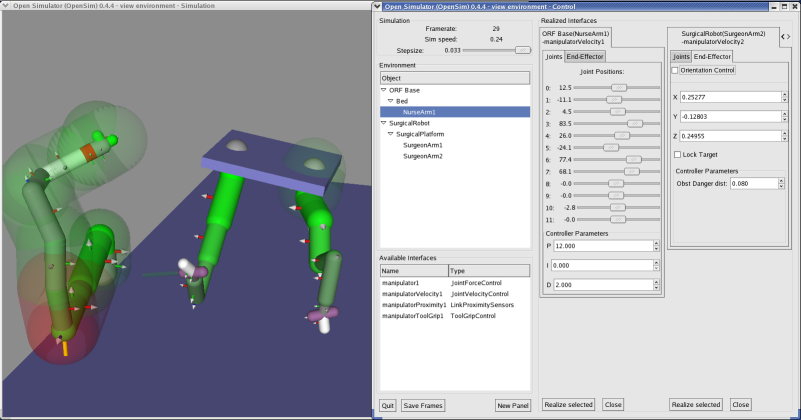
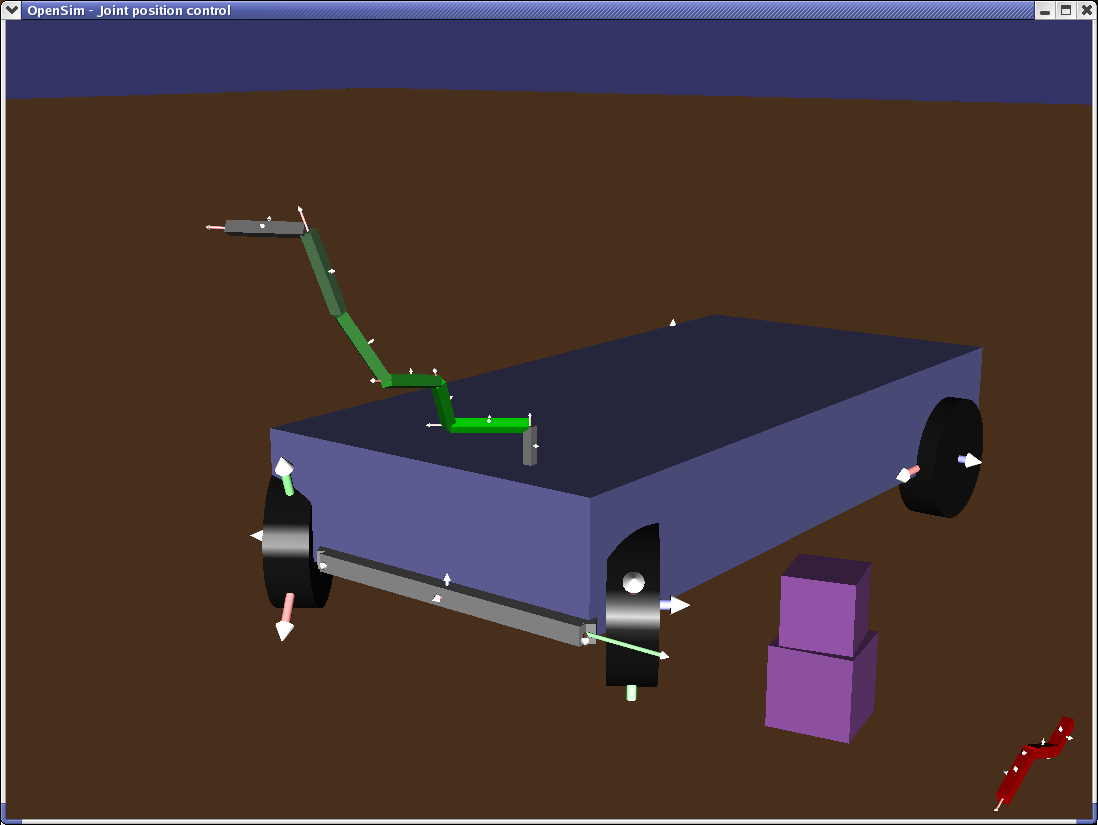
OpenSim is a 3D simulator that uses OpenGL for real-time rendering of the robot environment, including a physics engine to simulate dynamics in real-time (collision between arbitrary polyhedral objects with friction).
Note: OpenSim was actively developed between 2001-2006 and sporadically until around 2009. It is no longer under active development, however, there is a moderate amount of useful C++ code that may be reused.
A handful of simple sensors are implemented. The current implementation also contains a component called IKOR (Inverse Kinematics Of Redundant systems) which can quickly solve the IK problem with constraints (holonomic & non-holonomic) for arbitrary kinematic systems (i.e. robot manipulators).
The current version contains terrain rendering and some primitive shapes using Open Scene Graph (OSG) and Demeter (OpenGL); an implementation of physics using Open Dynamics Engine (ODE) with collision detection/response; and some inverse kinematics solution code for redundant manipulators (IKOR). Everything is written in ISO C++07 (namespaces, exceptions, STL, etc.). The system compiles on Linux (using gcc 3.4.2).
There is also a User & Developer Guide (PDF) available in the docs directory.
Feel free to scavange code. All the code is GPL'd. Contact me if you'd like to use the code in another project that uses a different OSS license.