{kind=link}
{kind=link}
Given some data of odometry of wheels and laser data this demo constructs using gmapping a map.
You can just launch:
roslaunch turtlebot_laser_work launch_all.launch
And it will launch all the necesarry stuff:
- wheels velocities publisher
- laser data publisher
- odom publisher from wheels info
- gmapping
- needed transforms (base_footprint to laser_link)
- rviz to watch what is happening
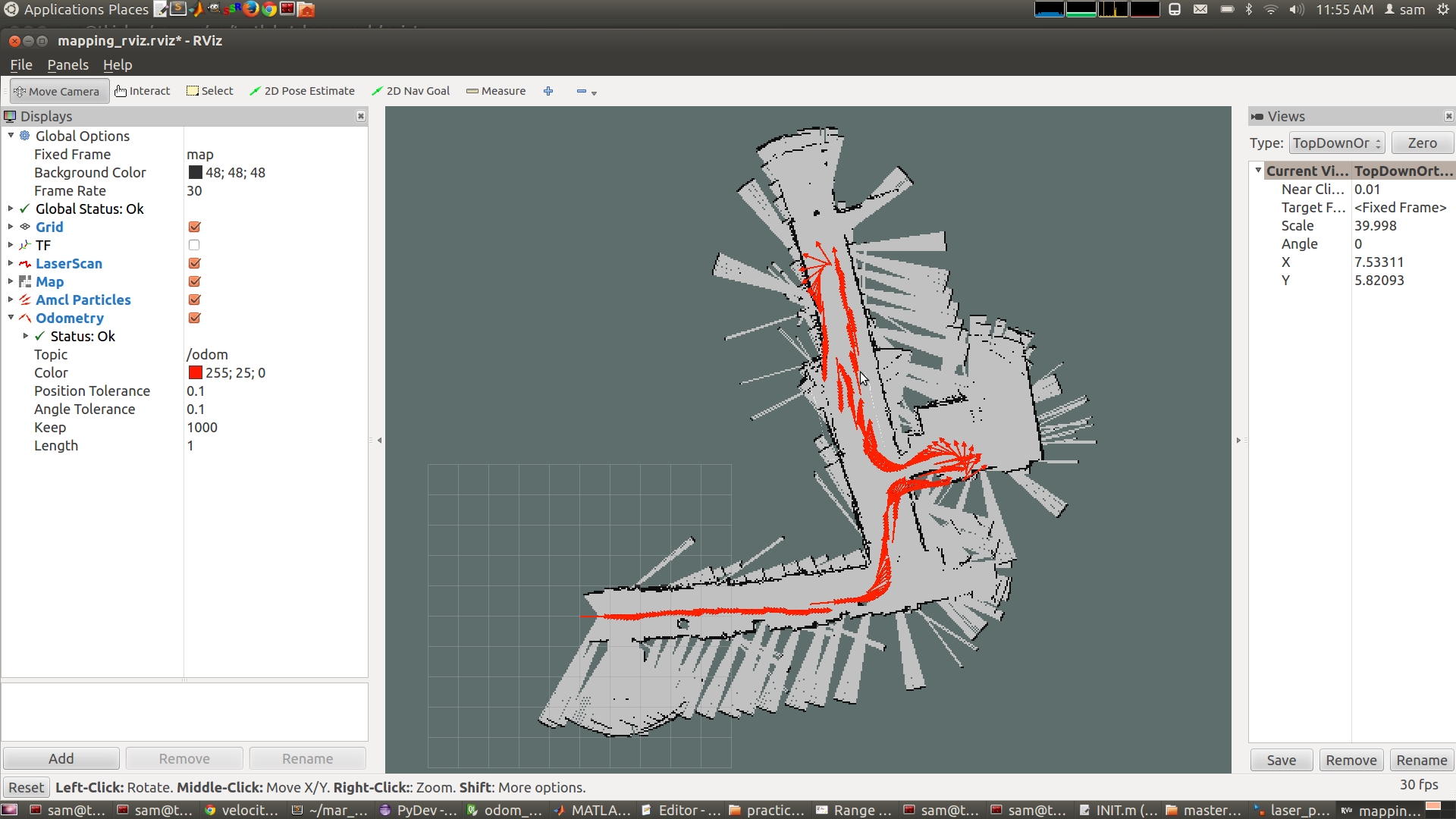
The result looks like:
Also you can try
roslaunch turtlebot_laser_work launch_laser_only.launch
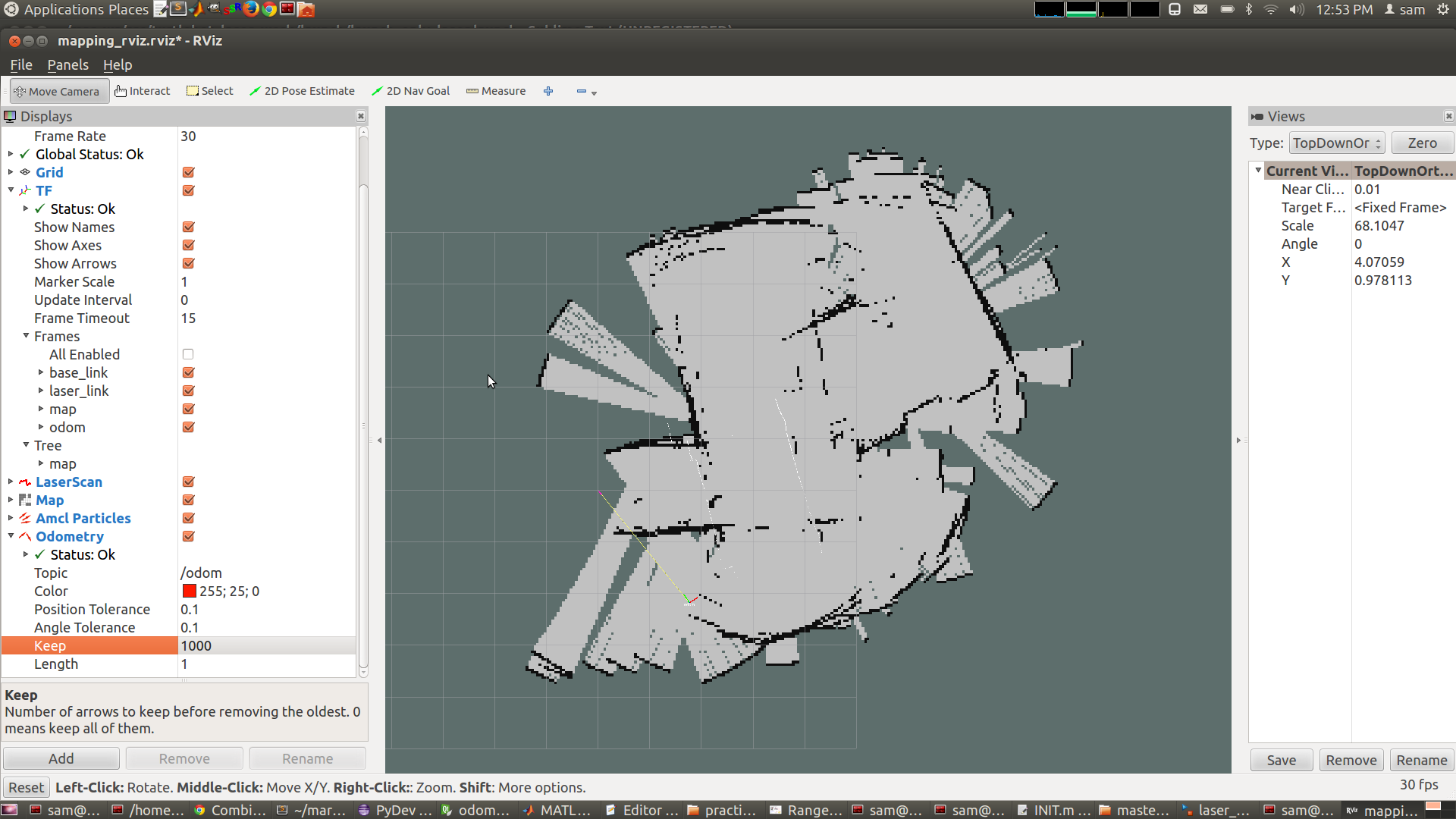
To use laser_scan_matcher to publish odom frame. The results are a lot worse.
The result looks like:
To use this last one you must clone: https://github.com/ccny-ros-pkg/scan_tools
and compile it in your workspace (laser_scan_matcher is there).