smarties is a Reinforcement Learning (RL) software designed with the following objectives
- high-performance C++ implementations of [Remember and Forget for Experience Replay](https://arxiv.org/abs/1807.05827) and other deep RL learning algorithms including V-RACER, CMA, PPO, DQN, DPG, ACER, and NAF.
- the environment application determines at runtime the properties of the control problem to be solved. For example, the number of the agents in the environment, whether they are solving the same problem (and therefore they should all contribute to learning a common policy) or they are solving different problems (e.g. competing or collaborating). The properties of each agent's state and action spaces. Whether one or more agents are dealing with a partially-observable problem, which causes the learners to automatically use recurrent networks for function approximation. Whether the observation has to be preprocessed by convolutional layers and the properties thereof.
- the environment application is in control of the learning progress. More specifically, smarties supports applications whose API design is similar to that of OpenAI gym, where the environment is a self-contained function to be called to receive a new observation and advance the simulation in time. However, smarties also supports a more realistic API where the environment simulation dominates the structure of the application code. In this setting, it is the RL code that is called whenever new observations are available and require the agent to pick an action.
- the environment application determines the computational resources available to train and run simulations, with support for distributed (MPI) codebases.
- minimally intrusive plug-in API that can be inserted into C++, python and Fortran simulation software.
To cite this repository, reference the paper:
@inproceedings{novati2019a,
title={Remember and Forget for Experience Replay},
author={Novati, Guido and Koumoutsakos, Petros},
booktitle={Proceedings of the 36\textsuperscript{th} International Conference on Machine Learning},
year={2019}
}
Contents of this document
Regardless of OS, smarties relies on pybind11 for the Python interface. Therefore, to enable compilation of smarties with Python environment simulation codebases:
pip3 install pybind11 --userMoreover, after the compilation steps for either Linux or Mac OS, add the path to the smarties library directory to your dynamic loader:
echo 'export SMARTIES_ROOT=/path/to/smarties/folder/' >> ~/.bash_profile
echo 'export PATH=${SMARTIES_ROOT}/bin:${PATH}' >> ~/.bash_profile
echo 'export LD_LIBRARY_PATH=${SMARTIES_ROOT}/lib:${LD_LIBRARY_PATH}' >> ~/.bash_profile
echo 'export PYTHONPATH=${PYTHONPATH}:${SMARTIES_ROOT}/lib' >> ~/.bash_profileOn Mac, LD_LIBRARY_PATH has to be replaced with DYLD_LIBRARY_PATH.
The environment variable SMARTIES_ROOT is used to compile most of the applications in the 'apps' folder.
Smarties requires gcc version 6.1 or greater, a thread-safe (at least MPI_THREAD_SERIALIZED) implementation of MPI, and a serial BLAS implementation with CBLAS interface. Furthermore, in order to test on the benchmark problems, OpenAI gym or the DeepMind Control Suite with python>=3.5. MPI and OpenBLAS can be installed by running the install_dependencies.sh script.
git clone --recursive https://github.com/cselab/smarties.git
cd smarties
mkdir -p build
cd build
cmake ..
make -jInstallation on Mac OS is a bit more laborious due to to the LLVM compiler provided by Apple not supporting OpenMP threads. First, install the required dependencies as:
brew install llvm libomp open-mpi openblasNow, we have to switch from Apple's LLVM compiler to the most recent LLVM compiler as default for the user's shell:
echo "export OMPI_CXX=/usr/local/opt/llvm/bin/clang++" >> ~/.bash_profileThen we are ready to get and install smarties with the same commands as for Linux. The compilation should take few minutes. Alternative: if mpic++ still points to the Apple clang binary, you may try:
ln -s /usr/local/opt/llvm/bin/clang++ /usr/local/opt/llvm/bin/g++
ln -s /usr/local/opt/llvm/bin/clang++ /usr/local/opt/llvm/bin/c++
echo "export PATH=/usr/local/opt/llvm/bin:\${PATH}" >> ~/.bash_profileThe basic structure of a C++ based application for smarties is structured as:
#include "smarties.h"
inline void app_main(smarties::Communicator*const comm, int argc, char**argv)
{
comm->setStateActionDims(state_dimensionality, action_dimensionality);
Environment env;
while(true) { //train loop
env.reset(comm->getPRNG()); // prng with different seed on each process
comm->sendInitState(env.getState()); //send initial state
while (true) { //simulation loop
std::vector<double> action = comm->recvAction();
bool isTerminal = env.advance(action); //advance the simulation:
if(isTerminal) { //tell smarties that this is a terminal state
comm->sendTermState(env.getState(), env.getReward());
break;
} else # normal state
comm->sendState(env.getState(), env.getReward());
}
}
}
int main(int argc, char**argv)
{
smarties::Engine e(argc, argv);
if( e.parse() ) return 1;
e.run( app_main );
return 0;
}For compilation, the following flags should be set in order for the compiler to find smarties:
LDFLAGS="-L${SMARTIES_ROOT}/lib -lsmarties"
CPPFLAGS="-I${SMARTIES_ROOT}/include"smarties uses pybind11 for seamless compatibility with python. The structure of the environment application is almost the same as the C++ version:
import smarties as rl
def app_main(comm):
comm.setStateActionDims(state_dimensionality, action_dimensionality)
env = Environment()
while 1: #train loop
env.reset() # (slightly) random initial conditions are best
comm.sendInitState(env.getState())
while 1: #simulation loop
action = comm.recvAction()
isTerminal = env.advance(action)
if terminated: # tell smarties that this is a terminal state
comm.sendTermState(env.getState(), env.getReward())
break
else: # normal state
comm.sendState(env.getState(), env.getReward())
if __name__ == '__main__':
e = rl.Engine(sys.argv)
if( e.parse() ): exit()
e.run( app_main )In many cases it is possible to launch an application compiled with smarties simple as, for example:
./exec [args...]The script smarties.py is provided to allow greater flexibility, to ease
passing options to smarties, and to help setting up MPI-based training processes.
For example, to have multiple processes running the environment (distributed
data-collection) or multiple processes hosting the RL algorithms (distributed SGD).
With the bin directory added to the shell PATH, the description of the
setup options are printed out by typing:
smarties.py --helpThe script takes 2 (optional) positional arguments, for example:
smarties.py cart_pole_py VRACER.jsonIn this case, smarties will train with the V-RACER algorithm, and hyper-parameters
defined in the VRACER.json file found in the SMARTIES_ROOT/settings directory
on the application cart_pole_py found in the SMARTIES_ROOT/apps folder.
All output files will be saved in the current directory.
If no arguments are provided, the script will look for an executable (named
exec or exec.py in the current directory or whatever specified with the
--execname exec option) and will use default hyper-parameters.
Most useful options:
--gymto tell smarties to run OpenAI gym applications (eg.smarties.py Walker2d-v2 --gym)--atarito tell smarties to run OpenAI gym Atari applications. For example,smarties.py Pong --atariwill run thePongNoFrameskip-v4environment with DQN-like preprocessing conv2d layers as specified byapps/OpenAI_gym_atari/exec.py.--dmcto tell smarties to run DeepMind Control Suite applications. For example,smarties.py "acrobot swingup" --dmcwill run theacrobotenvironment with taskswingup.--runname RUNNAMEwill execute the training run from folderRUNNAMEand create all output and setup files therein. The path of the folder is by defaultSMARTIES_ROOT/runs/RUNNAME, but may be modified for example as--runprefix ./, which will createRUNNAMEin the current directory.--nEvalEpisodes Ntells smarties that it should evaluate and not modify an already trained policy forNsequences (the smarties-generated restart files should be already located in the run directory or at path--restart /path/to/restart/).--args "arg1 arg2 ..in order to pass line arguments to the application.--nEnvironments Nwill spawnNprocesses running environment simulations. If the environment requires (or benefits from) one or more dedicated MPI ranks (recommended for clusters and expensive simulations) this can be set with--mpiProcsPerEnv M. In this case, 1+N*M MPI processes will run the training: one learner and N teams of M processes to handle the N simulations. If the network update needs to be parallelized (distributed SGD), use the option--nLearners K.
Note for evaluating trained policies. For safety, use the option --restart or copy all the agent_[...].raw files onto a new folder in order to not overwrite any file of the training directory. Make sure the policy is read correctly (eg. if code was compiled with different features or run with different algorithms) comparing the restarted_[...] files and the originals (e.g. diff /path/eval/run/restarted_agent_00_net_weights.raw /path/train/run/agent_00_net_weights.raw).
The apps folder contains a number of examples showing the various use-cases of smarties. Each folder contains the files required to define and run a different application. While it is generally possible to run each case as ./exec or ./exec.py, smarties will create a number of log files, simulation folders and restart files. Therefore it is recommended to manually create a run directory or use the launch scripts contained in the launch directory.
The applications that are already included are:
apps/cart_pole_cpp: simple C++ example of a cart-pole balancing problem.- Assuming, all steps in the Install section were successful, compile the application:
cd apps/cart_pole_cpp && make. As described above, running this application can be done as:- From the
cart_pole_cppdirectory,mkdir test && ../cart_pole. Here we create a new directoy, where all logging, saving, and postprocessing files will be created by smarties, and run the application directly. Because we do not use MPI, smarties will fork two processes, one running the environment (described by the application cart_pole) and one will run the training. - From the
cart_pole_cppdirectory,smarties.py -r test. Here we rely on the helper script to create the directorytestwhich by default will be placed in${SMARTIES_ROOT}\runs\. - From any directory,
smarties.py cart_pole_cpp -r testorsmarties.py apps/cart_pole_cpp -r test. Refer to the section above andsmarties.py --helpfor more customization options.
- From the
apps/cart_pole_py: simple python example of a cart-pole balancing problem. Can be run similarly to the C++ code:mkdir test && ../cart_pole.pyormkdir test && python3 ../cart_pole.py.apps/cart_pole_f90: simple fortran example of a cart-pole balancing problemapps/cart_pole_many: example of two cart-poles that define different decision processes: one performs the opposite of the action sent by smarties and the other hides some of the state variables from the learner (partially observable) and tehrefore requires recurrent networks.apps/cart_pole_distribEnv: example of a distributed environment which requires MPI. The application requests M ranks to run each simulation. If the executable is ran asmpirun -n N exec, (N-1)/M teams of processes will be created, each with its own MPI communicator. Each simulation process contains one or more agents.apps/cart_pole_distribAgent: example of a problem where the agent themselves are distributed. Meaning that the agents exist across the team of processes that run a simulation and get the same action to perform. For example flow actuation problems where there is only one control variable (eg. some inflow parameter), but the entire simulation requires multiple CPUs to run.apps/predator_prey: example of agents competing.apps/glider: example of an ODE-based control problem that requires precise controls, used for the paper [Deep-Reinforcement-Learning for Gliding and Perching Bodies](https://arxiv.org/abs/1807.03671)apps/func_maximization/: example of function fitting and maximization, most naturally approached with CMA.apps/OpenAI_gym: code to run most gym application, including the MuJoCo based robotic benchmarks shown in [Remember and Forget for Experience Replay](https://arxiv.org/abs/1807.05827)apps/OpenAI_gym_atari: code to run the Atari games, which automatically creates the required convolutional pre-processingapps/Deepmind_control: code to run the Deepmind Control Suite control problemsapps/CUP2D_2fish: and similarly named applications require CubismUP 2D.apps/CUP3D_LES_HIT: requires CubismUP 3D. Refer to the README file therein for more information and to access pre-trained models.


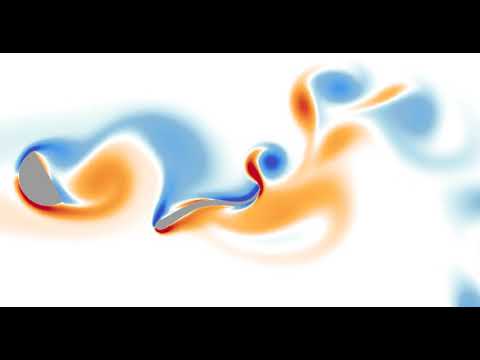
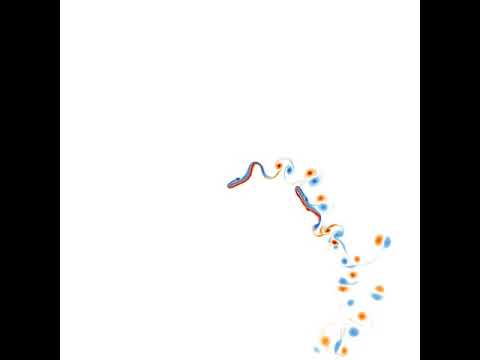
- The first two visualizations are from G. Novati and P. Koumoutsakos, “Remember and forget for experience replay," in Proceedings of the 36th international conference on machine learning, 2019.
- The fifth is from S. Verma, G. Novati, and P. Koumoutsakos, “Efficient collective swimming by harnessing vortices through deep reinforcement learning," Proceedings of the national academy of sciences, p. 201800923, 2018.
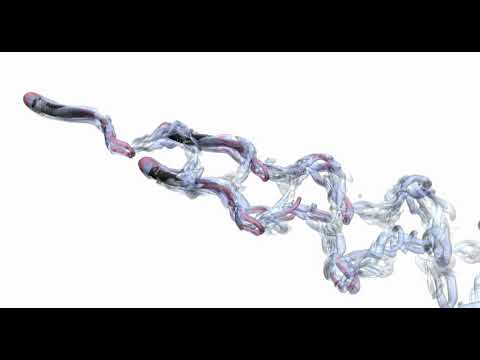
- The fourth is from G. Novati, S. Verma, D. Alexeev, D. Rossinelli, W. M. van Rees, and P. Koumoutsakos, “Synchronisation through learning for two self-propelled swimmers," Bioinspiration & biomimetics, vol. 12, iss. 3, p. 36001, 2017.
- Se also G. Novati, L. Mahadevan, and P. Koumoutsakos, “Controlled gliding and perching through deep-reinforcement-learning," Physical review fluids, vol. 4, iss. 9, 2019 for an introduction to using deep RL to obtain optimal control policies in fluid mechanics problems.
The second argument when launching smarties is the settings file describing the learning algorithm. If unset, settings/VRACER.json is selected. I will run through each variable:
- "learner": Chosen learning algorithm. One of: 'VRACER', 'RACER', 'PPO', 'DPG', 'ACER', 'NAF', 'DQN', 'CMA', 'PYTORCH'. Default is VRACER.
- "returnsEstimator": Algorithm used to compute return estimates. Accepts: 'retrace', 'retraceExplore' (which adds (1-gamma)*|qRet - qNet| to rewards), 'GAE', 'default' (which is default and yields retrace for (V)RACER and GAE for PPO), 'none'. Only NAF and DPG are compatible with all options. PPO and (V)RACER are incompatible with 'none'. ACER and DQN are not affected.
- "ERoldSeqFilter": Filter algorithm to remove old episodes from memory buffer. Accepts: 'oldest', 'farpolfrac', 'maxkldiv'. Oldest is default and corresponds to first-in-first-out.
- "dataSamplingAlgo": Algorithm for sampling the Replay Buffer. Accepts 'uniform', 'PERrank', 'PERerr' (prioritized experience replay), and other experimental implementations of uniform sampling. Uniform is default (and best).
- "gamma": Discount factor. Defaults to 0.995.
- "lambda": Lambda for off-policy return-based estimators (used in retrace and GAE). Defaults to 1.
- "clipImpWeight": Clipping range for off-policy importance weights. Triggers usage of ReF-ER when selected with (V)RACER, DDPG, NAF, DQN. Corresponds to: C in ReF-ER's Rule 1, epsilon in PPO's surrogate policy objective, c in ACER's truncation and bias correction. Defaults to sqrt(dim(action) / 2.0).
- "klDivConstraint": Constraint on max KL div. USed by PPO and ACER. Corresponds to: d_targ in PPO's penalization, delta in ACER's truncation and bias correction. Defaults to 0.01.
- "explNoise": Noise added to policy. For discrete policies it may be the probability of picking a random action (detail depend on learning algo), for continuous policies it is the (initial) standard deviation. Defaults to sqrt(0.2).
- "penalTol": Tolerance used for adaptive off-policy penalization methods. Currently corresponds only to D in ReF-ER's Rule 2. Defaults to 0.1.
- "maxTotObsNum": Max number of transitions in training buffer. Defaults to 2^14 * sqrt(dim(action) + dim(state)).
- "minTotObsNum": Min number of transitions in training buffer before training starts. If minTotObsNum=0, is set equal to maxTotObsNum i.e. fill RM before training starts. Defaults to 0.
- "obsPerStep": Ratio of observed transitions to gradient steps. E.g. 0.1 means that for every observation learner does 10 gradient steps. Defaults to 1.
- "learnrate": Learning rate. Defaults to 1e-4.
- "ESpopSize": Population size for CMA-ES algorithm. Only compatible with (V)RACER. If unset, or set to <2, we use Adam to optimize network parameters. Defaults to 1.
- "batchSize": Network training batch size. Defaults to 256.
- "epsAnneal": Annealing rate for network learning rate and ReF-ER clipping parameters (if enabled). Defaults to 5e-7, which halves the learn rate in 2e6 grad steps.
- "nnLambda": Penalization factor for network weights. It will be multiplied by learn rate: w -= eta * nnLambda * w.
- "targetDelay": Copy delay for Target Nets (TNs). If 0, TNs are disabled. If 'val'>1: every 'val' grad steps network's W copied onto TN (like DQN). If 'val'<1: every grad step TN updated by exp. averaging with rate 'val' (like DPG). Only compatible with ACER, DQN, DDPG, and NAF.
- "nnType": Type of non-output layers read from settings. Accepts 'RNN', 'GRU', 'LSTM', everything else maps to feed-forward NN. Conv2D layers need to be built in environment directly with the API described below. Defaults to 'FFNN'.
- "nnLayerSizes": Sizes of non-convolutional layers (LSTM/RNN/FFNN). Defaults to [128, 128].
- "encoderLayerSizes": Sizes of non-convolutional encoder layers (LSTM/RNN/FFNN). E.g. '64 64'. This only applies to networks which have multiple networks (e.g. policy and value). The encoder layers (and any Conv2D layers) are shared by all networks. For example, when using PPO, setting "encoderLayerSizes" to 64 and "nnLayerSizes" to 64 means that an encoder layer of size 64 will be created. The policy and value network will have one layer of size 64 and take as input the output of the encoder. Defaults to [0].
- "nnBPTTseq": Number of previous steps considered by RNN's back-propagation through time window. No effect if using FFNN. Defaults to 16.
- "nnFunc": Activation function for non-output layers (which is almost always linear) which are built from settings. ('Relu', 'Tanh', 'Sigm', 'PRelu', 'softSign', 'softPlus', ...). Defaults to 'SoftSign'.
- "nnOutputFunc": Activation function for output layers. Defaults to 'Linear'.
- "outWeightsPrefac": Output weights initialization factor (will be multiplied by default fan-in factor). Picking 1 leads to treating output layers with normal Xavier initialization. Defaults to 0.1.
- "saveFreq": Number of gradient steps between writing of checkpoint file of learner's state. Defaults to 200000.
In settings/default.json we list all values the hyper-parameters take if the fields are left empty in the .json file.
Running the script will produce the following outputs on screen (also backed up into the files
agent_%02d_stats.txt). According to applicability, these are either statistics computed over the past 1000 steps or are the most recent values:ID: Learner identifier. If a single environment contains multiple agents, and if each agent requires a different policy, then we distinguish outputs pertinent to each agent with this ID integer.#/1e3: Counter of gradient steps divided by 1000avgR | stdr | DKL: Average cumulative reward among stored episodes, standard dev of the distribution of instantaneous rewards, and average Kullback Leibler divergence of experiences in the Memory Buffer w.r.t. current policy.nEp | nObs | totEp | totObs | oldEp | nFarP: Number of episodes and observations in the Replay Memory. Total ep/obs since beginning of training passing through the buffer. Time stamp of the oldest episode (more precisely, of the last observation of the episode) that is currently in the buffer. Number of far-policy samples in the buffer.netand/orpolicyand/orcriticand/orinputand/or other: L2 norm of the weights of the corresponding network approximator.RMSE | avgQ | stdQ | minQ | maxQ: RMSE of Q (or V) approximator, its average value, standard deviation, min and max.- (if algorithm employs parameterized policy)
polG | penG | projAverage norm of the policy gradient and that of the penalization gradient (if applicable). Third is the average projection of the policy gradient over the penalty one. I.e. the average value ofproj = polG \cdot penG / sqrt(penG \cdot penG).projshould generally be negative: current policy should be moved away from past behavior in the direction of pol grad. - (extra outputs depending on algorithms) In RACER/DPG:
betais the weight between penalty and policy gradients.avgWis the average value of the off policy importance weightpi/mu.dAdvis the average change of the value of the Retrace estimator for a state-action pair between two consecutive times the pair was sampled for learning. In PPO:betais the coefficient of the penalty gradient.DKLis the average Kullback Leibler of the 'proximally' on-policy samples used to compute updates.avgWis the average value ofpi/mu.DKLtis the target value of Kullback Leibler if algorithm is trying to learn a value for it.

- The file
agent_%02d_rank%02d_cumulative_rewards.datcontains the all-important cumulative rewards. It is stored as text-columns specifying: gradient count, time step count, agent id, episode length (in time steps), sum of rewards over the episode. The first two values are recorded when the last observation of the episode has been recorded. Can be plotted with the scriptsmarties_plot_rew.pyscript (eg. the figure on the left above).smarties_plot_rew.pyaccepts a list of run directories and optional arguments explained bymarties_plot_rew.py --help. - If data logging was not disabled (option
--disableDataLoggingforsmarties.py), a complete log of all state/action/rewards/policies will be stored in binary files namedagent_02d_rank%02d_obs.raw. These can be plotted by the scriptsmarties_plot_obs.py(eg. the figure on the right above). The help message is straightforward. - The files named
agent_%02d_${network_name}_${SPEC}.rawcontain back-ups of network weights (weights), Adam's moments estimates (1stMomand2ndMom) and target weights (tgt_weights) at regularly spaced time stamps. Some insight into the shape of the weight vector can be obtained by plotting with the scriptsmarties_plot_weights.py. The files ending inscaling.rawcontain the values used to rescale the states and rewards. Specifically, one after the other, 3 arrays of sized_Sof the state-values means, 1/stdev, and stdev, followed by one value corresponding to 1/stdev of the rewards. - The files
agent_%02d_${network_name}_grads.rawrecord the statistics (mean, standard deviation) of the gradients received by each network output. Can be plotted withsmarties_plot_grads.py. - Various files ending in
.log. These record the state of smarties on startup. They include:gitdiff.logrecords the changes wrt the last commit,gitlog.logrecords the last commits,out.logis a copy of the screen output, andproblem_size.logrecords state/action sizes used by other scripts.
Here are reported all the functions available through the Communicator passed by smarties to the environment app_main function (see :ref:`ref-to-main-loop`). The main difference between using these functions with Python, as opposed to C++, is that Python lists or numpy arrays are used in place of std::vector<double>.
Use python3 -c 'import smarties as rl; help(rl)' when in doubt.
These function are all thread-safe (not in Python, obviously) as long as different threads use different agentIDs.
void sendInitState(const std::vector<double>& state, const int agentID = 0)Send the first state of a new episode for agent # 'agentID'. Because no action has been done yet there is no reward.
void sendState(const std::vector<double>& state, const double reward, const int agentID = 0)Send normal state and reward for agent # 'agentID'.
void sendTermState(const std::vector<double>& state, const double reward, const int agentID = 0)Send terminal state and reward for agent # 'agentID'. Note: V(s_terminal) = 0 because episode cannot continue. For example, agent succeeded in task, or is incapacitated, or time ran out on a time-constrained task.
void sendLastState(const std::vector<double>& state, const double reward, const int agentID = 0)Send last state and reward of the episode for agent # 'agentID'. Note: This corresponds to V(s_last) != 0 and it implies that it would be possible to continue the episode with this policy. In other words, timeout is not caused by the agent's policy. For example, when a robot is learning to perform a repetitive task (e.g. walk) and there is some arbitrary time horizon (e.g. in OpenAI gym). Or in an environment where multiple cars are being driven by RL and which requires a full reset after each collision between cars. Two cars might crash and reach their terminal state. In this case, the cars not involved in the collision would be in a 'last state', because their policy was not cause for termination.
std::vector<double>& recvAction(const int agentID = 0)Get the action for agent # 'agentID' selected by the RL algorithm according to the previously sent state (either initial or normal). Cannot be called after a last or terminal state.
These functions have to be used before calling 'sendInitState' for the first time.
void setNumAgents(int nAgents)Set number of agents in the environment.
void setStateActionDims(const int dimState, const int dimAct, const int agentID = 0)Set dimensionality of state and action for agent # 'agentID'.
void setActionScales(const std::vector<double> upper, const std::vector<double> lower, const bool bound, const int agentID = 0)Set lower and upper scale of the actions for agent # 'agentID'. Boolean arg specifies if actions are bounded between given values. Implies continuous action spaces.
void setActionScales(const std::vector<double> upper, const std::vector<double> lower, std::vector<bool> bound, const int agentID = 0)Set lower and upper scale of the actions for agent # 'agentID'. Boolean vector specifies if actions components are bounded between gien values. Implies continuous action spaces.
void setActionOptions(const int options, const int agentID = 0)Set number of discrete control options for agent # 'agentID'. Implies discrete action spaces.
void setActionOptions(const std::vector<int> options, const int agentID = 0)Set number of discrete control options for agent # 'agentID' in case of multi-dimensional options vectors (e.g. choose to turn left/right and shoot/dontshoot). Reduntant because can be directly mapped onto the previous function. Implies discrete action spaces.
void setStateObservable(const std::vector<bool> observable, const int agentID = 0)For each state variable, set whether observed by agent # 'agentID'. Allows hiding state components from agent (will not be included in policy/value networks) or passing auxilliary observables to smarties such that they will be logged to file.
void setStateScales(const std::vector<double> upper, const std::vector<double> lower, const int agentID = 0)Set upper & lower scaling values for the state of agent # 'agentID'.
void setIsPartiallyObservable(const int agentID = 0)Specify that the decision process of agent # 'agentID' is non-Markovian and therefore smarties will use RNN.
void envHasDistributedAgents()Returns true if smarties is training, false if evaluating a policy.
void agentsDefineDifferentMDP()Specify that each agent defines a different MPD (state/action/rew). This means that smarties will train a separate policy for each agent in the environment. All problem specification settings submitted before calling this function will be shared among all agents.
void disableDataTrackingForAgents(int agentStart, int agentEnd)Set agents whose experiences should not be used as training data.
void agentsShareExplorationNoise(const int agentID = 0)void setPreprocessingConv2d(const int input_width, const int input_height, const int input_features, const int kernels_num, const int filters_size, const int stride, const int agentID = 0)Request a convolutional layer in preprocessing of state for agent # 'agentID'. This function can be called multiple times to add multiple conv2d layers, but sizes (widths, heights, filters) must be consistent otherwise it will trigger an abort.
void setNumAppendedPastObservations(const int n_appended, const int agentID = 0)Specify that the state of agent # 'agentID' should be composed with the current observation along with n_appended past ones. Like it was done in the Atari Nature paper to avoid using RNN.
void finalizeProblemDescription()Signals that problem formulation will not be changed further. This function is otherwise called automatically by smarties before the first 'sendInitState'. It is only required that the user explicitly calls this function before starting the training loop for multi-threaded environments. In this case, multiple threads might attempt to call this function during their first 'sendInitState', which is not thread-safe.
These functions can be called at any time.
std::mt19937& getPRNG()Passes a random number generator. C++ only.
Real getUniformRandom(const Real begin = 0, const Real end = 1)Returns an uniformly distributed real number.
Real getNormalRandom(const Real mean = 0, const Real stdev = 1)Returns a normally distributed real number.
bool isTraining()Returns true if smarties is training, false if evaluating a policy.
bool terminateTraining()Returns true if smarties is requesting application to exit. If application does not return after smarties requests an exit smarties will trigger an abort (inelegant exit).
unsigned getLearnersGradStepsNum(const int agentID = 0)Returns the number of grad steps performed by the learning algorithm associated with agent # 'agentID'.
unsigned getLearnersTrainingTimeStepsNum(const int agentID = 0)Returns the total number of actions (experiences) collected by the learning algorithm associated with agent # 'agentID'.
double getLearnersAvgCumulativeReward(const int agentID = 0)Returns the average cumulative reward among all experiences in the Replay Memory of the learning algorithm associated with agent # 'agentID'. Not supported by on-policy methods.
const std::vector<double>& getOptimizationParameters(int agentID = 0)void setOptimizationEvaluation(const Real R, const int agentID = 0)