课程1.ROS介绍及基于ROS的底盘软件架构
官方定义:ROS(Robot Operating System)是面向机器人的开源的元操作系统(meta-operating system)。它能够提供类似传统操作系统的诸多功能,如硬件抽象、底层设备控制、常用功能实现、进程间消息传递和程序包管理等。此外,它还提供相关工具和库,用于获取、编译、编辑代码以及在多个计算机之间运行程序完成分布式计算。
ROS = 管道+工具+能力+生态

| ROS版本 | electric | fuerte | groovy | hydro | indigo | jade | kinetic | luna | melodic |
|---|---|---|---|---|---|---|---|---|---|
| Ubuntu版本 | 10.04-11.10 | 10.04 11.10 12.04 |
11.10 12.04 12.10 |
12.04 12.10 13.04 |
13.10 14.04 |
14.04 14.10 15.04 |
15.10 16.04 |
16.04 16.10 17.04 |
17.10 18.04 |
官方教程具有十分详细的介绍。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt update
sudo apt install ros-kinetic-desktop-full
或安装其它包:sudo apt install ros-kinetic-ros-base, sudo apt install ros-kinetic-navigation, sudo apt install gmapping
source /opt/ros/kinetic/setup.bash
如果不想每次打开终端都导出环境变量,可将其添加到.bashrc文件中:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
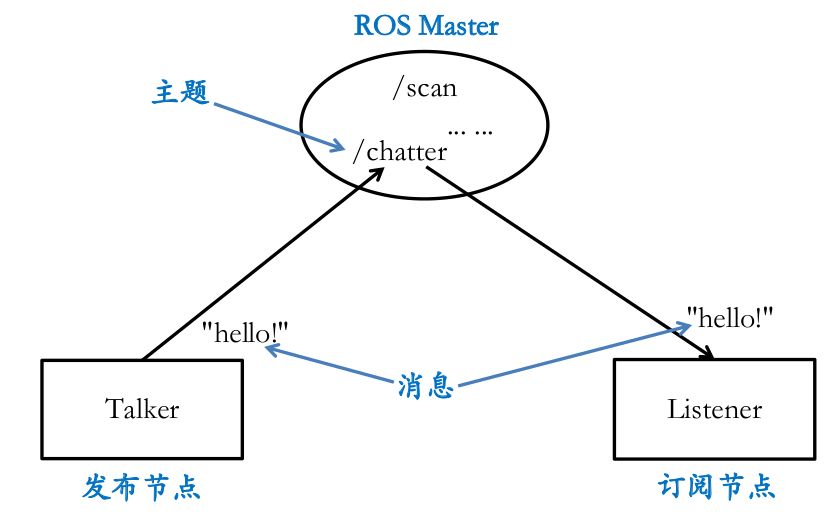
ROS整个通信机制的核心就是:发布订阅机制。例如下图:名为Talker的节点向/chatter主题发送字符串"hello",另一个名为Listener的节点订阅/chatter主题,接收主题的字符串。
注意:每个主题跟消息类型是绑定的。比如,如果一个主题是接收string类型消息的,则不能接收int数据类型消息。
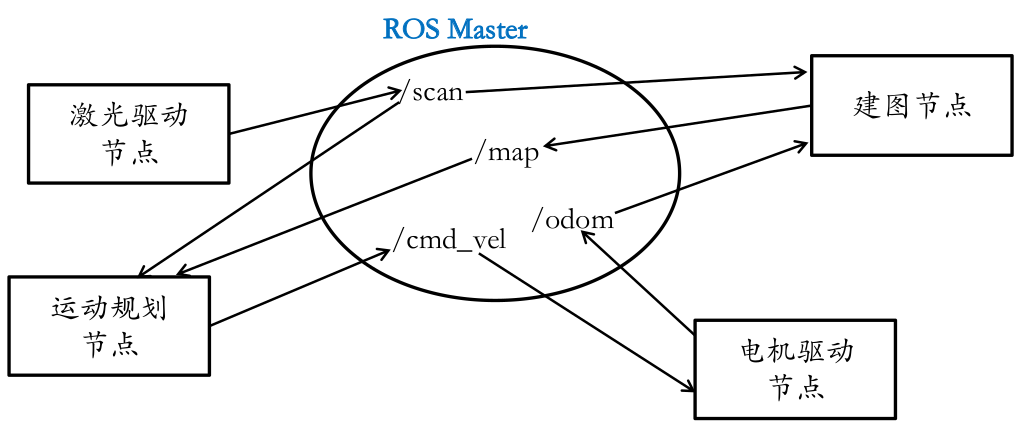
下面是一个更具体的例子,即底盘导航模块所用到的节点及主题。
ROS中工作区、包、节点的概念类比:
| ROS | Visual Studio |
|---|---|
| 工作区(workspace) | 解决方案(solution) |
| 包(package) | 工程(project) |
| 节点(node) | 可执行文件(executable) |
工作区即一个目录,用mkdir命令创建即可:
$ cd ~
$ mkdir catkin_ws
在工作区目录下,创建名为src的文件夹:
$ cd ~/catkin_ws
$ mkdir src
此时的目录结构:
~
|--catkin_ws
|--src
$ cd ~/catkin_ws/src
$ catkin_create_pkg trd_driver
此时的目录结构:
~
|--catkin_ws
|--src
|--trd_driver
|--CMakeLists.txt
|--package.xml
$ cd ~/catkin_ws/src/trd_driver
$ mkdir src
$ cd src
$ vim hello_world_node.cpp
编辑hello_world_node.cpp内容
#include "ros/ros.h"
int main() {
ROS_INFO("hello world!");
return 0;
}修改~/catkin_ws/src/trd_driver/CMakeLists.txt内容:
cmake_minimum_required(VERSION 2.8.3)
project(trd_driver)
find_package(catkin REQUIRED
roscpp
)
catkin_package(CATKIN_DEPENDS
)
include_directories(
include
${catkin_INCLUDE_DIRS}
)
# hello_world_node
add_executable(hello_world_node
src/hello_world_node.cpp
)
target_link_libraries(hello_world_node
${catkin_LIBRARIES})
此时的目录结构:
~
|--catkin_ws
|--src
|--trd_driver
|--CMakeLists.txt
|--package.xml
|--src
|--hello_world_node.cpp
编译:
$ cd ~/catkin_ws
$ catkin_make
~
|--catkin_ws
|--lib #编译结果目录
|--devel #编译结果目录
|--src
|--trd_driver
|--CMakeLists.txt
|--package.xml
|--src
|--hello_world_node.cpp
- 运行(方式一):
$ cd ~/catkin_ws
$ ./devel/lib/trd_driver/hello_world_node.cpp
- 运行(方式二):
先将此工作区下的ROS包导出到环境变量,然后用ros run指令启动:
$ cd ~/catkin_ws
$ source ./devel/setup.bash
$ rosrun trd_driver hello_world_node
- 运行(方式三):
建立launch文件,用launch文件启动。
功能:以10Hz的频率,向/chatter主题发布"hello x"(x为计数)字符串。
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
int main(int argc, char *argv[]) {
ros::init(argc, argv, "talker"); //初始化节点,名称为"talker"
ros::NodeHandle nh; //创建节点句柄
ros::Publisher pub =
nh.advertise<std_msgs::String>("chatter", 1000); //创建发布者
ros::Rate loop_rate(10); //设置循环频率
int count = 0; //循环计数
while (ros::ok()){
std_msgs::String msg; //创建消息
std::stringstream ss;
ss << "Hello " << count;
msg.data = ss.str(); //消息赋值
ROS_INFO("send [%s]", msg.data.c_str());
pub.publish(msg); //发布消息
ros::spinOnce(); //非阻塞调用
loop_rate.sleep();
++count;
}
return 0;
}功能:订阅/chatter主题,并打印收到的内容。
#include "ros/ros.h"
#include "std_msgs/String.h"
void subCallback(const std_msgs::String::ConstPtr& msg) {
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
int main(int argc, char *argv[]) {
ros::init(argc, argv, "listener"); //初始化节点,名称为"listener"
ros::NodeHandle nh;//创建节点句柄
ros::Subscriber sub =
nh.subscribe("chatter", 1000, subCallback); //创建订阅者
ros::spin(); //阻塞调用
return 0;
}请参照官方教程自行尝试。
- roscore:启动ROS master主服务
- rviz:可视化工具(地图、图片、点云、机器人模型... ...)
- rqt_reconfigure:配置参数界面
- rqt_graph:弹出所有节点/主题关系可视化界面
- rosnode list:列出正在运行的节点
- rosnode info node_name:打印节点信息
- rosnode kill node_name:停止某个节点
- rosrun package node:启动package包下的node节点
- rostopic list:列出正在运行的topic名字列表
- rostopic info:打印topic类型信息
- rostopic echo:打印topic实时数据信息
- roscd package:切换到package包所在路径
- rosed package abc.cpp:用编辑器打开package包下的abc.cpp文件
- rosservice list:列出正在运行的service名字列表
- rosservice info service_name:打印service类型信息
- roslaunch launch_file_name:启动launch文件
- roslaunch-deps abc.launch:列出launch文件中依赖的package
- rosmsg list:已安装msg名字列表
- rosmsg show msg_name:已安装msg类型信息
- rosmsg package 包名:包包含的所有msg名
- rospack list: 列出已安装的包
- rosstack list:列出已安装的元包
- rosbag record topic_name -O abc.bag:记录topic到abc.bag文件
- rosbag play abc.bag:播放bag文件
- roswtf:打印错误检查
- rossrv list:已安装srv名字列表
- rossrv show srv_name:已安装srv类型信息
- rossrv package 包名:包包含的所有srv名
- ROS维基网站: http://wiki.ros.org/
- ROS官方教程: http://wiki.ros.org/ROS/Tutorials
- ROS Answers论坛: answers.ros.org
- 创客智造: https://www.ncnynl.com/
(英文版) 链接: https://pan.baidu.com/s/1WtsiWh7o542KCgSNMR8ugQ 密码: ci3k
(中文版) 链接: https://pan.baidu.com/s/1skP5o819hZE1OsXypFD_Gw 密码: p8f9
链接: https://pan.baidu.com/s/1sjegN3w_ehvhxT00d1xBiw 密码: bnce
链接: https://pan.baidu.com/s/1QkqD-Zu_i3KJNCn0xSsKng 密码: qd82
链接: https://pan.baidu.com/s/1d4UZd3Ast9SxPhz8HZh9gg 密码: ep42