forked from uzh-rpg/rpg_esim
-
Notifications
You must be signed in to change notification settings - Fork 0
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
71 changed files
with
53,473 additions
and
412 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,50 +1,169 @@ | ||
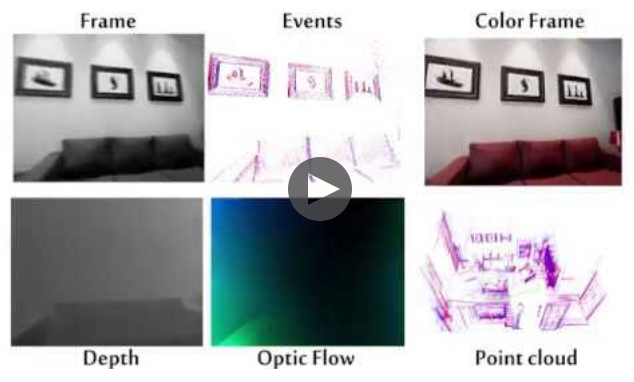
| # ESIM: an Open Event Camera Simulator | ||
|
|
||
| [](https://youtu.be/ytKOIX_2clo) | ||
| This repository contains the source code for the improved [ESIM](https://rpg.ifi.uzh.ch/esim.html) event camera simulator used in **Robust *e*-NeRF** <sub>[](https://wengflow.github.io/robust-e-nerf) [](https://arxiv.org/abs/2309.08596) [](https://github.com/wengflow/robust-e-nerf) [](https://huggingface.co/datasets/wengflow/robust-e-nerf)</sub>. In particular, we incorporate the following changes: | ||
|
|
||
| 1. Event simulation model | ||
| - Improve the overall event simulation accuracy by accounting for additional edge cases | ||
| - Improve the refractory period model by explicitly resetting the pixel reference intensity and timestamp at the end of the refractory period | ||
| - Desynchronize initial event generation across pixels by randomly initializing pixel reference timestamps | ||
| - Model junction leakage, which increases the rate of ON events and decreases the rate of OFF events | ||
| - Modify the pixel-to-pixel contrast threshold variation model to be time-independent | ||
| - Merge `feature/color` branch to support color event cameras | ||
| 2. Rendering engine | ||
| - Support [Blender](https://www.blender.org) as a rendering engine | ||
| - Support [Unreal Engine](https://www.unrealengine.com) 4.27.2 with a modified [UnrealCV](https://unrealcv.org/) plugin | ||
| 3. Camera trajectory | ||
| - Circumvent singularities in interpolating quaternion orientations by supporting rotation vector/angle-axis orientation representation in the trajectory CSV for interpolation | ||
| 4. Miscellaneous | ||
| - Fix various bugs & installation errors | ||
|
|
||
| If you use this improved version of ESIM for your work, please cite: | ||
|
|
||
| ```bibtex | ||
| @inproceedings{low2023_robust-e-nerf, | ||
| title = {Robust e-NeRF: NeRF from Sparse & Noisy Events under Non-Uniform Motion}, | ||
| author = {Low, Weng Fei and Lee, Gim Hee}, | ||
| booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)}, | ||
| year = {2023} | ||
| } | ||
| ``` | ||
|
|
||
| This is the code for the 2018 CoRL paper **ESIM: an Open Event Camera Simulator** by [Henri Rebecq](http://henri.rebecq.fr), [Daniel Gehrig](https://danielgehrig18.github.io/) and [Davide Scaramuzza](http://rpg.ifi.uzh.ch/people_scaramuzza.html): | ||
| ```bibtex | ||
| @Article{Rebecq18corl, | ||
| author = {Henri Rebecq and Daniel Gehrig and Davide Scaramuzza}, | ||
| title = {{ESIM}: an Open Event Camera Simulator}, | ||
| journal = {Conf. on Robotics Learning (CoRL)}, | ||
| year = 2018, | ||
| month = oct | ||
| @inproceedings{rebecq18_esim, | ||
| author = {Henri Rebecq and Daniel Gehrig and Davide Scaramuzza}, | ||
| title = {{ESIM}: an Open Event Camera Simulator}, | ||
| journal = {Conf. on Robotics Learning (CoRL)}, | ||
| year = 2018 | ||
| } | ||
| ``` | ||
| You can find a pdf of the paper [here](http://rpg.ifi.uzh.ch/docs/CORL18_Rebecq.pdf). If you use any of this code, please cite this publication. | ||
|
|
||
| ## Python Bindings | ||
| Python bindings for the event camera simulator can be found [here](https://github.com/uzh-rpg/rpg_vid2e). | ||
| We now also support GPU support for fully parallel event generation! | ||
| ## Installation | ||
|
|
||
| The following installation steps were tested on Ubuntu 20.04 and 22.04 with GTX 1080 Ti, RTX 3090 and RTX A5000 GPUs. | ||
|
|
||
| ### ESIM | ||
|
|
||
| We recommend creating a new Catkin workspace specifically for ESIM. We name the workspace as `esim_ws` and place it under the home directory, as follows: | ||
| ```bash | ||
| mkdir -p ~/esim_ws/src | ||
| ``` | ||
|
|
||
| Clone this repository into the source space of the workspace with: | ||
| ```bash | ||
| cd ~/esim_ws/src | ||
| git clone https://github.com/wengflow/rpg_esim.git | ||
| ``` | ||
|
|
||
| We also recommend using [Conda](https://docs.conda.io/en/latest/) to set up an environment with the appropriate dependencies for running ESIM, as follows: | ||
| 1. Install [Mamba](https://mamba.readthedocs.io/en/latest/index.html), an improved re-implementation of Conda, according to the [official instructions](https://mamba.readthedocs.io/en/latest/mamba-installation.html#mamba-install) | ||
| 2. Create the `esim` environment with: | ||
| ```bash | ||
| mamba env create -f rpg_esim/environment.yml | ||
| ``` | ||
| 3. Activate the environment and initialize `rosdep` with: | ||
| ```bash | ||
| conda activate esim | ||
| rosdep init | ||
| rosdep update | ||
| ``` | ||
|
|
||
| Initialize and configure the workspace with: | ||
| ```bash | ||
| catkin init | ||
| catkin config --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo | ||
| vcs-import < rpg_esim/dependencies.yaml | ||
|
|
||
| cd ze_oss | ||
| touch imp_3rdparty_cuda_toolkit/CATKIN_IGNORE \ | ||
| imp_app_pangolin_example/CATKIN_IGNORE \ | ||
| imp_benchmark_aligned_allocator/CATKIN_IGNORE \ | ||
| imp_bridge_pangolin/CATKIN_IGNORE \ | ||
| imp_cu_core/CATKIN_IGNORE \ | ||
| imp_cu_correspondence/CATKIN_IGNORE \ | ||
| imp_cu_imgproc/CATKIN_IGNORE \ | ||
| imp_ros_rof_denoising/CATKIN_IGNORE \ | ||
| imp_tools_cmd/CATKIN_IGNORE \ | ||
| ze_data_provider/CATKIN_IGNORE \ | ||
| ze_geometry/CATKIN_IGNORE \ | ||
| ze_imu/CATKIN_IGNORE \ | ||
| ze_trajectory_analysis/CATKIN_IGNORE | ||
| ``` | ||
| We set `-DCMAKE_BUILD_TYPE=RelWithDebInfo`, instead of `-DCMAKE_BUILD_TYPE=Release`, to preserve the ease of debugging while still enabling code optimization during compilation. | ||
|
|
||
| Build the `esim_ros` package with: | ||
| ```bash | ||
| catkin build esim_ros | ||
| ``` | ||
|
|
||
| Lastly, add the following alias to your `.bashrc` file for activating the `esim` Conda environment and sourcing the [ROS](https://www.ros.org/) environment setup files: | ||
| ```bash | ||
| alias cae='conda activate esim; source ~/esim_ws/devel/setup.bash' | ||
| ``` | ||
|
|
||
| The installation steps described above were consolidated from the following sources, with some modifications: | ||
| 1. https://github.com/uzh-rpg/rpg_esim/wiki/Installation | ||
| 2. https://github.com/uzh-rpg/rpg_esim/wiki/Installation-(ROS-Melodic) | ||
| 3. https://robostack.github.io/GettingStarted.html | ||
|
|
||
| ### Blender | ||
|
|
||
| To use Blender as the rendering engine, we require [Blender as a Python module](https://docs.blender.org/api/current/info_advanced_blender_as_bpy.html) being installed in a separate `blender` Conda environment with a compatible Python version and [PyZMQ](https://pyzmq.readthedocs.io/en/latest/) also installed. | ||
|
|
||
| We provide a Python wheel for Blender 3.4.0 at [this link](https://github.com/wengflow/rpg_esim/releases/download/v1.0/bpy-3.4.0a0-cp310-cp310-manylinux_2_31_x86_64.whl), which is compiled with [CUDA Toolkit](https://developer.nvidia.com/cuda-toolkit) 11.4 and [NVIDIA OptiX](https://developer.nvidia.com/rtx/ray-tracing/optix) 7.3.0 support (requires NVIDIA R465.84 driver or newer), for Linux and Python 3.10. The `blender` environment may be created with all the necessary dependencies, including this wheel, with the following: | ||
| ```bash | ||
| conda env create -f rpg_esim/blender_environment.yml | ||
| ``` | ||
|
|
||
| Alternatively, build Blender as a Python module from source, according to the [official instructions](https://wiki.blender.org/w/index.php?title=Building_Blender/Other/BlenderAsPyModule), and install it via `pip` in the `blender` environment. | ||
|
|
||
| ## Features | ||
| ### UnrealEngine and UnrealCV | ||
|
|
||
| - Accurate event simulation, guaranteed by the tight integration between the rendering engine and the event simulator | ||
| - Inertial Measurement Unit (IMU) simulation | ||
| - Support for multi-camera systems | ||
| - Ground truth camera poses, IMU biases, angular/linear velocities, depth maps, and optic flow maps | ||
| - Support for camera distortion (only planar and panoramic renderers) | ||
| - Different C+/C- contrast thresholds | ||
| - Basic noise simulation for event cameras (based on additive Gaussian noise on the contrast threshold) | ||
| - Motion blur simulation | ||
| - Publish to ROS and/or save data to rosbag | ||
| To use UnrealEngine as the rendering engine, first install UnrealEngine 4.27 ([Windows/Mac](https://docs.unrealengine.com/4.27/en-US/Basics/InstallingUnrealEngine/), [Linux](https://docs.unrealengine.com/4.27/en-US/SharingAndReleasing/Linux/BeginnerLinuxDeveloper/SettingUpAnUnrealWorkflow/)). Then, build a compatible UnrealCV Plugin from [this modified source code](https://github.com/wengflow/unrealcv/tree/esim), according to the [official instructions](https://docs.unrealcv.org/en/master/plugin/install.html#compile-from-source-code). | ||
|
|
||
| ## Install | ||
| ## Using Blender as the Rendering Engine | ||
|
|
||
| Installation instructions can be found in [our wiki](https://github.com/uzh-rpg/rpg_esim/wiki/Installation). | ||
| ### Configuration Options | ||
| Configuration options for the Blender rendering engine are detailed at the top of `blender_renderer.cpp` of the `imp_blender_renderer` ROS package. Note that with N GPUs, the valid `blender_render_device_type` and `blender_render_device_id` combinations are as follows: | ||
|
|
||
| ## Run | ||
| | `blender_render_device_type` | `blender_render_device_id` | | ||
| | :---: | :---: | | ||
| | 0 (CPU) | N | | ||
| | 1 (CUDA) | 0 to N-1 | | ||
| | 2 (OptiX) | N+1 to 2N | | ||
|
|
||
| Specific instructions to run the simulator depending on the chosen rendering engine can be found in [our wiki](https://github.com/uzh-rpg/rpg_esim/wiki). | ||
| A sample usage is provided in `cfg/blender.conf` of the `esim_ros` package. | ||
|
|
||
| ## Acknowledgements | ||
| ### Running ESIM with Blender | ||
|
|
||
| We thank Raffael Theiler and Dario Brescianini for their contributions to ESIM. | ||
| This research was supported by by Swiss National Center of Competence Research Robotics (NCCR), Qualcomm (through the Qualcomm Innovation Fellowship Award 2018), the SNSF-ERC Starting Grant and DARPA FLA. | ||
| First, start the Blender rendering server on a given port (*e.g.* 5555) with: | ||
| ```bash | ||
| cae | ||
| roscd imp_blender_renderer | ||
| conda activate blender | ||
| python scripts/blender_bridge.py --port 5555 | ||
| ``` | ||
|
|
||
| Then, run ESIM under a given configuration (*e.g.* `cfg/blender.conf`) in another terminal with: | ||
| ```bash | ||
| cae | ||
| roscd esim_ros | ||
| roslaunch esim_ros esim.launch config:=cfg/blender.conf | ||
| ``` | ||
|
|
||
| To visualize the output of the simulator, you can open `rviz` (from a new terminal) as follows: | ||
| ```bash | ||
| cae | ||
| roscd esim_visualization | ||
| rviz -d cfg/esim.rviz | ||
| ``` | ||
|
|
||
| You can also open `rqt` for more visualizations, as follows: | ||
| ```bash | ||
| cae | ||
| roscd esim_visualization | ||
| rqt --perspective-file cfg/esim.perspective | ||
| ``` | ||
|
|
||
| A significant part of ESIM uses components (spline trajectories, inertial measurement unit simulation, various utility functions) from the [ze_oss](https://github.com/zurich-eye/ze_oss) project. | ||
| ESIM depends on [UnrealCV](https://github.com/unrealcv/unrealcv) for the photorealistic rendering engine. | ||
| We also reused some [code samples](https://github.com/JoeyDeVries/LearnOpenGL.git) from the excellent [Lean OpenGL](https://learnopengl.com/) tutorial in our OpenGL rendering engine. | ||
| Finally, ESIM depends on the [Open Asset Import Library (assimp)](https://github.com/assimp/assimp) to load 3D models and Blender scenes within the OpenGL rendering engine. | ||
| Please refer to the [ESIM wiki](https://github.com/uzh-rpg/rpg_esim/wiki) for further details on the usage of other rendering engines. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,10 @@ | ||
| name: blender | ||
| channels: | ||
| - conda-forge | ||
| - defaults | ||
| dependencies: | ||
| - python=3.10.2 | ||
| - pip=22.2.2 | ||
| - pyzmq=24.0.1 | ||
| - pip: | ||
| - https://github.com/wengflow/rpg_esim/releases/download/v1.0/bpy-3.4.0a0-cp310-cp310-manylinux_2_31_x86_64.whl |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,10 @@ | ||
| name: blender_4_0 | ||
| channels: | ||
| - conda-forge | ||
| - defaults | ||
| dependencies: | ||
| - python=3.10.2 | ||
| - pip=22.2.2 | ||
| - pyzmq=24.0.1 | ||
| - pip: | ||
| - https://github.com/wengflow/rpg_esim/releases/download/v1.0/bpy-3.4.0a0-cp310-cp310-manylinux_2_31_x86_64.whl |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,45 +1,45 @@ | ||
| repositories: | ||
| catkin_simple: | ||
| type: git | ||
| url: git@github.com:catkin/catkin_simple.git | ||
| url: https://github.com/catkin/catkin_simple.git | ||
| version: master | ||
| ze_oss: | ||
| type: git | ||
| url: git@github.com:uzh-rpg/ze_oss.git | ||
| version: master | ||
| url: https://github.com/wengflow/ze_oss.git | ||
| version: esim | ||
| gflags_catkin: | ||
| type: git | ||
| url: git@github.com:ethz-asl/gflags_catkin.git | ||
| url: https://github.com/ethz-asl/gflags_catkin.git | ||
| version: master | ||
| glog_catkin: | ||
| type: git | ||
| url: git@github.com:ethz-asl/glog_catkin.git | ||
| version: master | ||
| url: https://github.com/wengflow/glog_catkin.git | ||
| version: esim | ||
| eigen_catkin: | ||
| type: git | ||
| url: git@github.com:ethz-asl/eigen_catkin.git | ||
| url: https://github.com/ethz-asl/eigen_catkin.git | ||
| version: master | ||
| eigen_checks: | ||
| type: git | ||
| url: git@github.com:ethz-asl/eigen_checks.git | ||
| url: https://github.com/ethz-asl/eigen_checks.git | ||
| version: master | ||
| minkindr: | ||
| type: git | ||
| url: git@github.com:ethz-asl/minkindr.git | ||
| url: https://github.com/ethz-asl/minkindr.git | ||
| version: master | ||
| minkindr_ros: | ||
| type: git | ||
| url: git@github.com:ethz-asl/minkindr_ros.git | ||
| url: https://github.com/ethz-asl/minkindr_ros.git | ||
| version: master | ||
| yaml_cpp_catkin: | ||
| type: git | ||
| url: git@github.com:ethz-asl/yaml_cpp_catkin.git | ||
| url: https://github.com/ethz-asl/yaml_cpp_catkin.git | ||
| version: master | ||
| rpg_dvs_ros: | ||
| type: git | ||
| url: git@github.com:uzh-rpg/rpg_dvs_ros.git | ||
| version: master | ||
| url: https://github.com/wengflow/rpg_dvs_ros.git | ||
| version: esim | ||
| assimp_catkin: | ||
| type: git | ||
| url: git@github.com:uzh-rpg/assimp_catkin.git | ||
| url: https://github.com/uzh-rpg/assimp_catkin.git | ||
| version: master |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,31 @@ | ||
| name: esim | ||
| channels: | ||
| - conda-forge | ||
| - robostack | ||
| - robostack-experimental | ||
| - defaults | ||
| dependencies: | ||
| # Robostack ROS Noetic Dependencies | ||
| - python=3.8 | ||
| - ros-noetic-desktop=1.5.0 | ||
| - compilers=1.4.2 | ||
| - cmake=3.23.1 | ||
| - pkg-config=0.29.2 | ||
| - make=4.3 | ||
| - ninja=1.11.0 | ||
| - colcon-common-extensions=0.3.0 | ||
| - catkin_tools=0.8.5 | ||
| - rosdep=0.21.0 | ||
| - py-opencv=4.5.2 # Fix OpenCV version for identical imread() RGB-to-grayscale behaviour | ||
|
|
||
| # ESIM Dependencies | ||
| - vcstool=0.3.0 | ||
| - ros-noetic-pcl-ros=1.7.2 | ||
| - ros-noetic-hector-trajectory-server=0.5.2 | ||
| - glfw=3.3.7 | ||
| - glm=0.9.9.4 | ||
| - cppzmq=4.8.1 | ||
|
|
||
| # `glog_catkin` Dependencies | ||
| - automake=1.16.5 # Reference: https://github.com/buffer/pylibemu/issues/24#issuecomment-434268519 | ||
| - autoconf=2.69 # Reference: https://github.com/ethz-asl/glog_catkin/issues/27#issuecomment-384325459 |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Oops, something went wrong.