Reference to the research paper: https://github.com/Kartik-715/WoxBot/blob/main/docs/WoxBot.pdf
Our goal is to obtain virtual creatures capable of performing specific tasks in their environment by exploring certain strategies and adapting those whenever necessary.
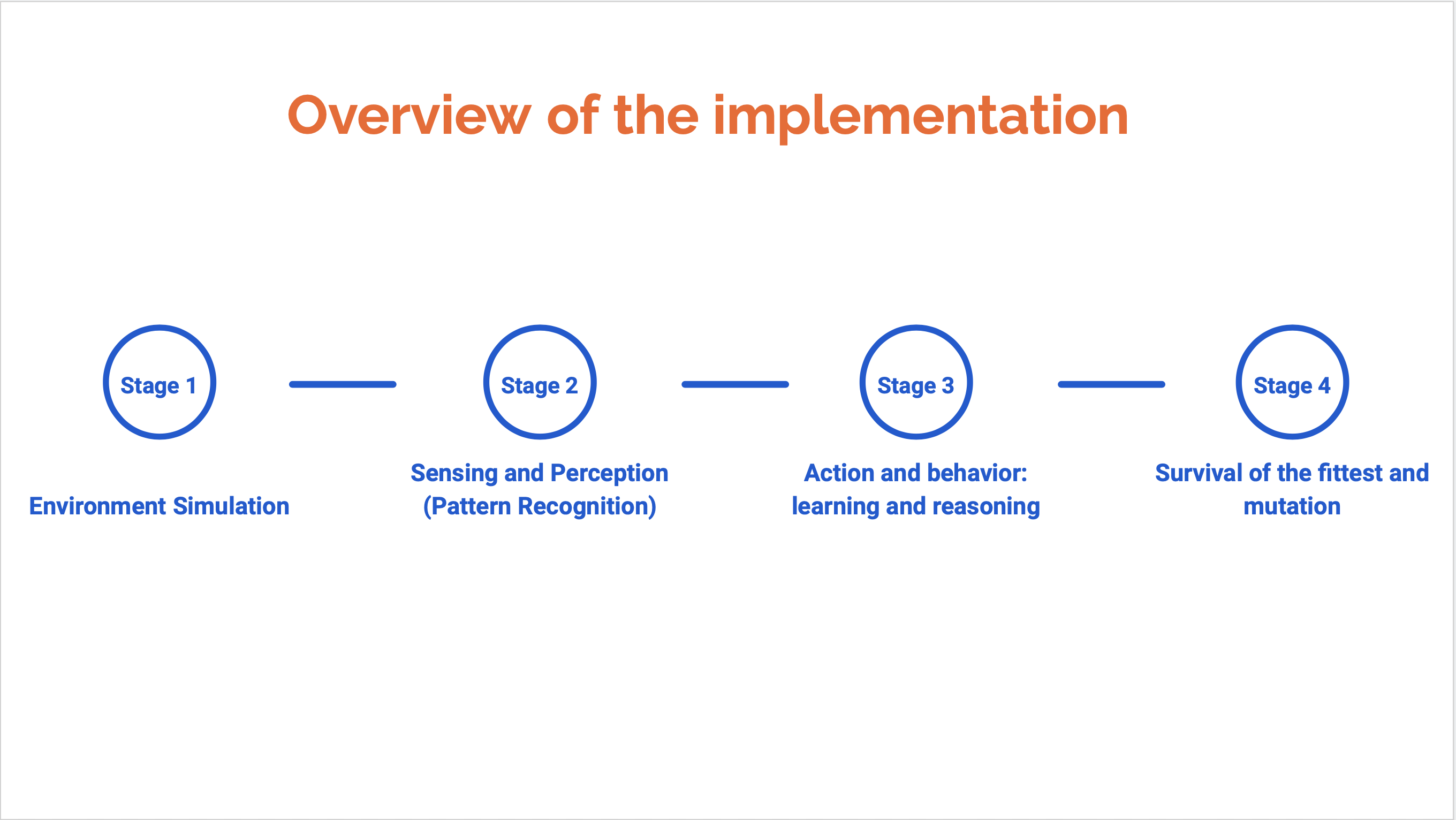
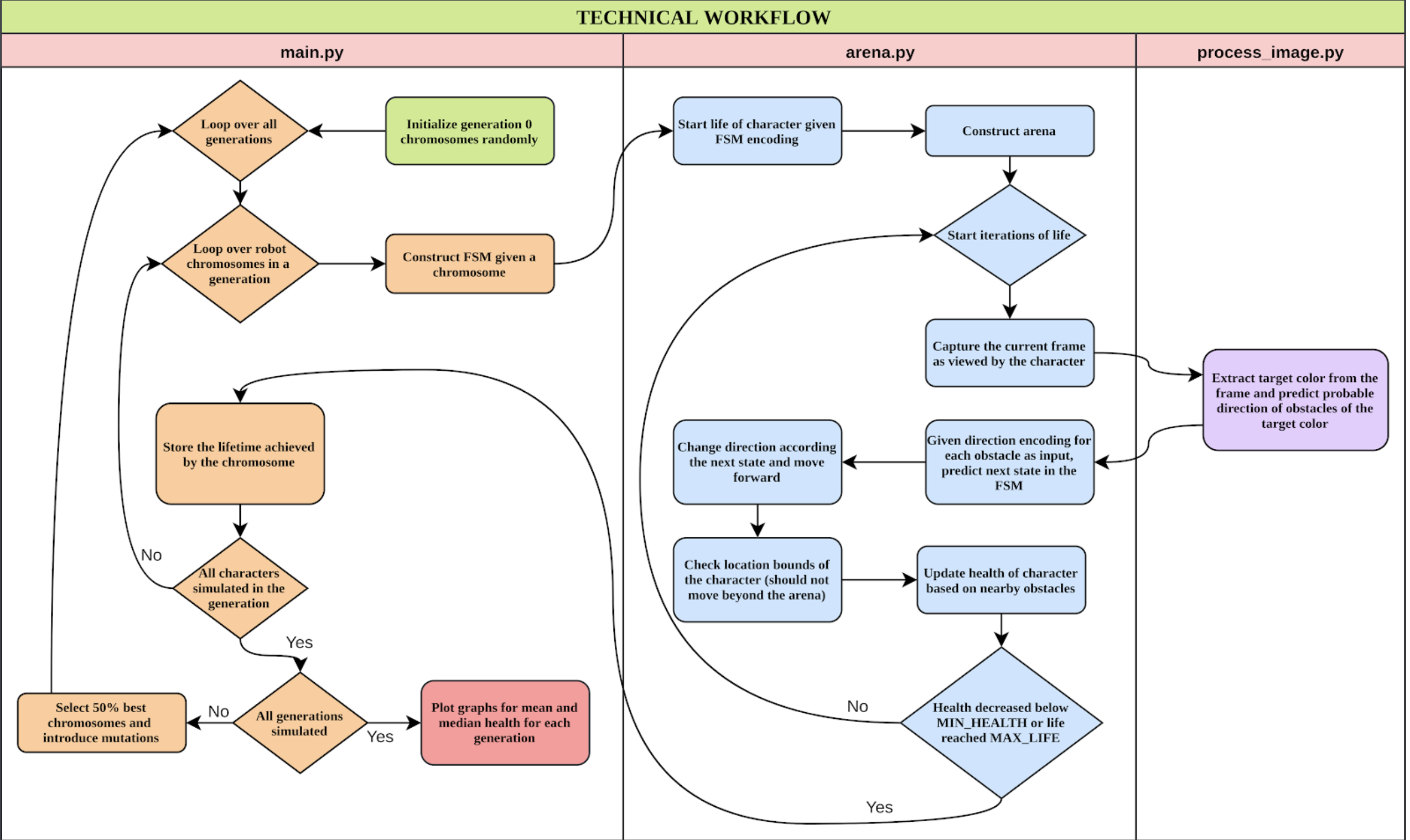
The ARENA robot - called WOXBOT has a vision system consisting of a simulated camera and an image processing algorithm that classify the visual patterns to provide input to a motor system controlled by a deterministic finite state machine (FSM).
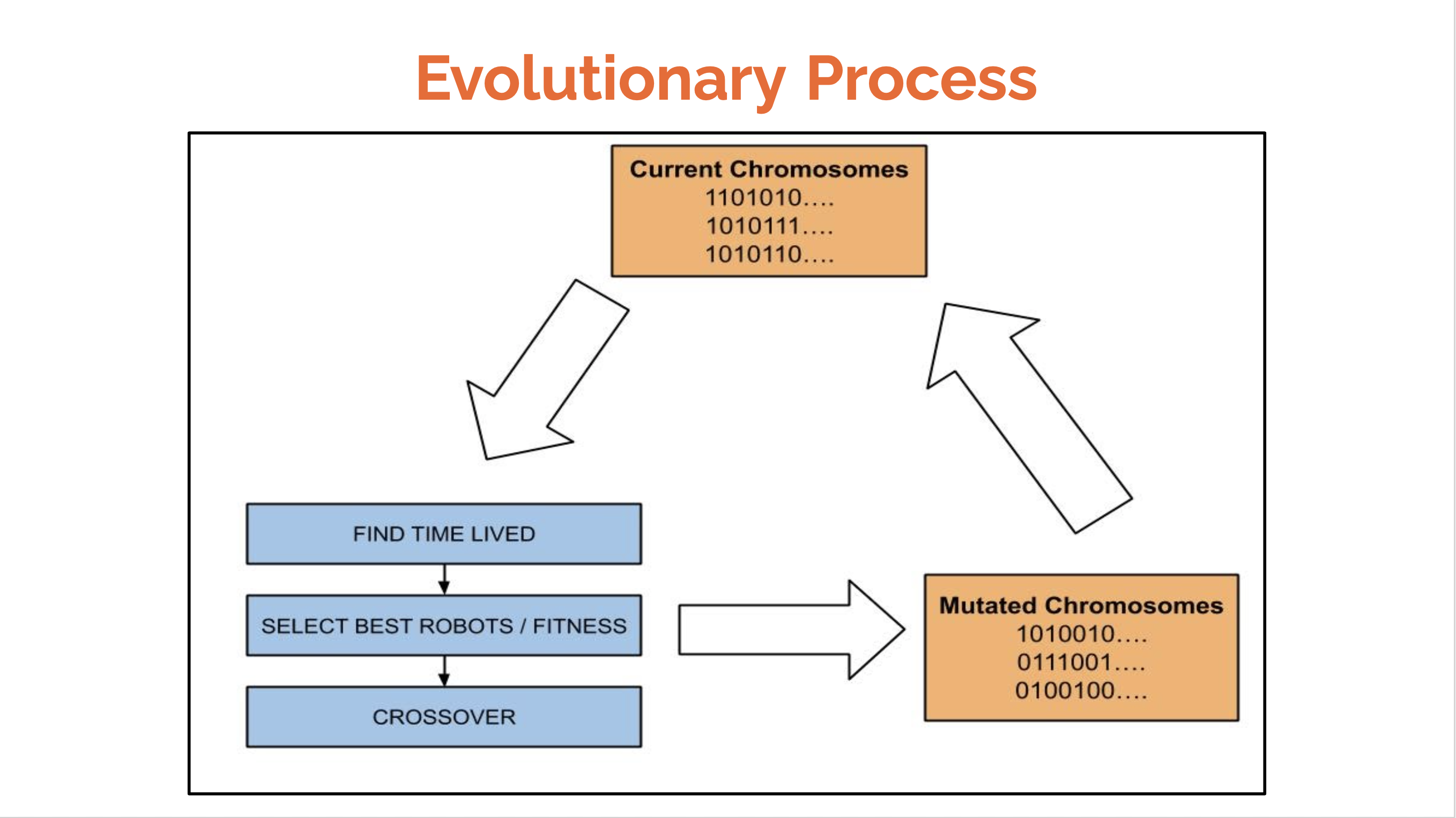
This FSM is an automaton obtained from an optimization procedure implemented with a genetic algorithm, and applied through generations of robots.
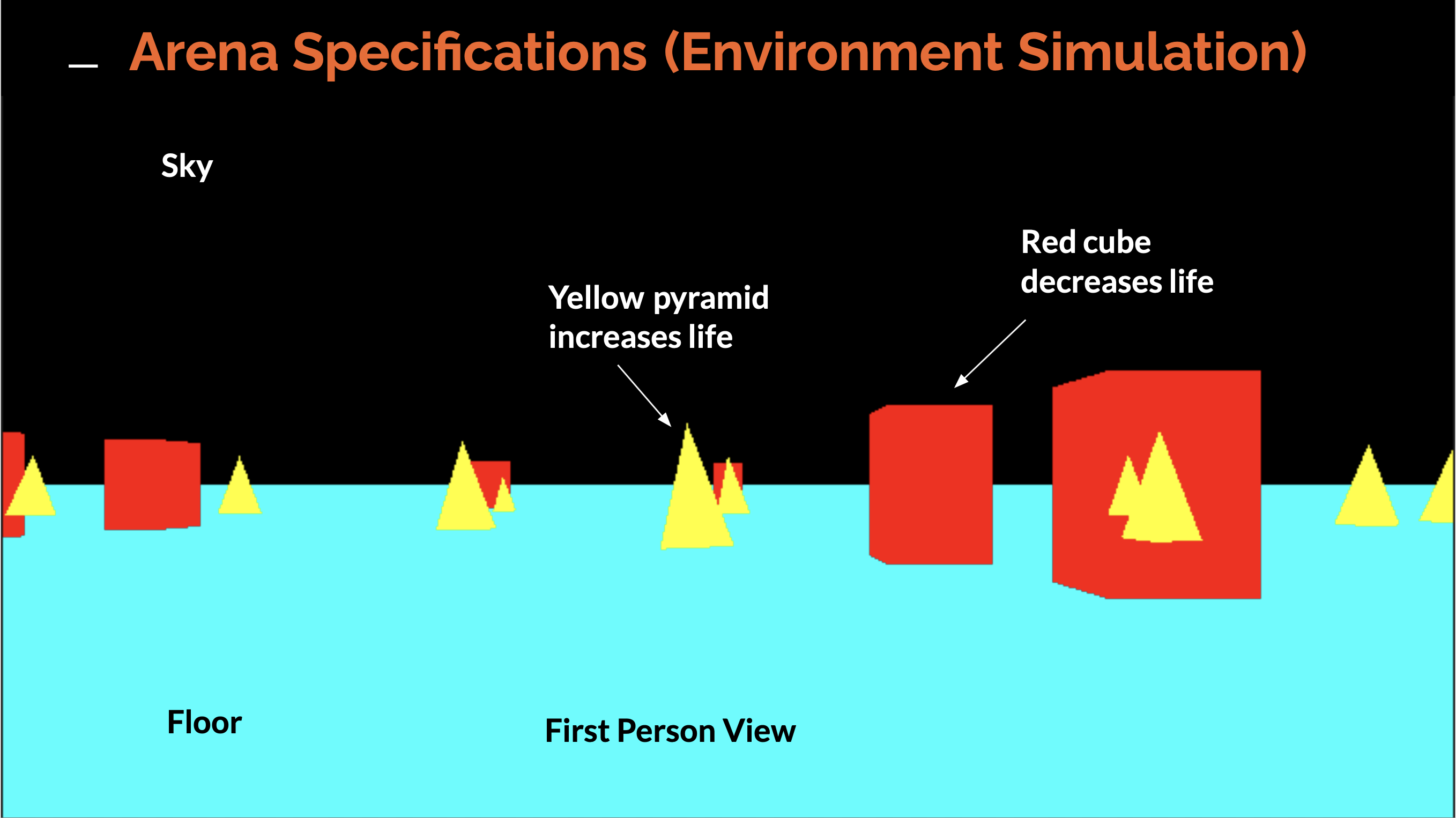
One of the tasks that WOXBOT has to perform in this first project is to be aware of nutrients (yellow pyramids) and hurting entities (red cubes) that are present in ARENA.
The visual information is gathered from the 3D surrounding scene by projecting it to a view port with 3 color channels, namely R (red), G (green) and B (blue).
To differentiate and spatially locate these entities, we have designed an algorithm that takes input the visual feed taken from the robot and outputs the location of target colour in the view according to the intensities of the color in various regions.
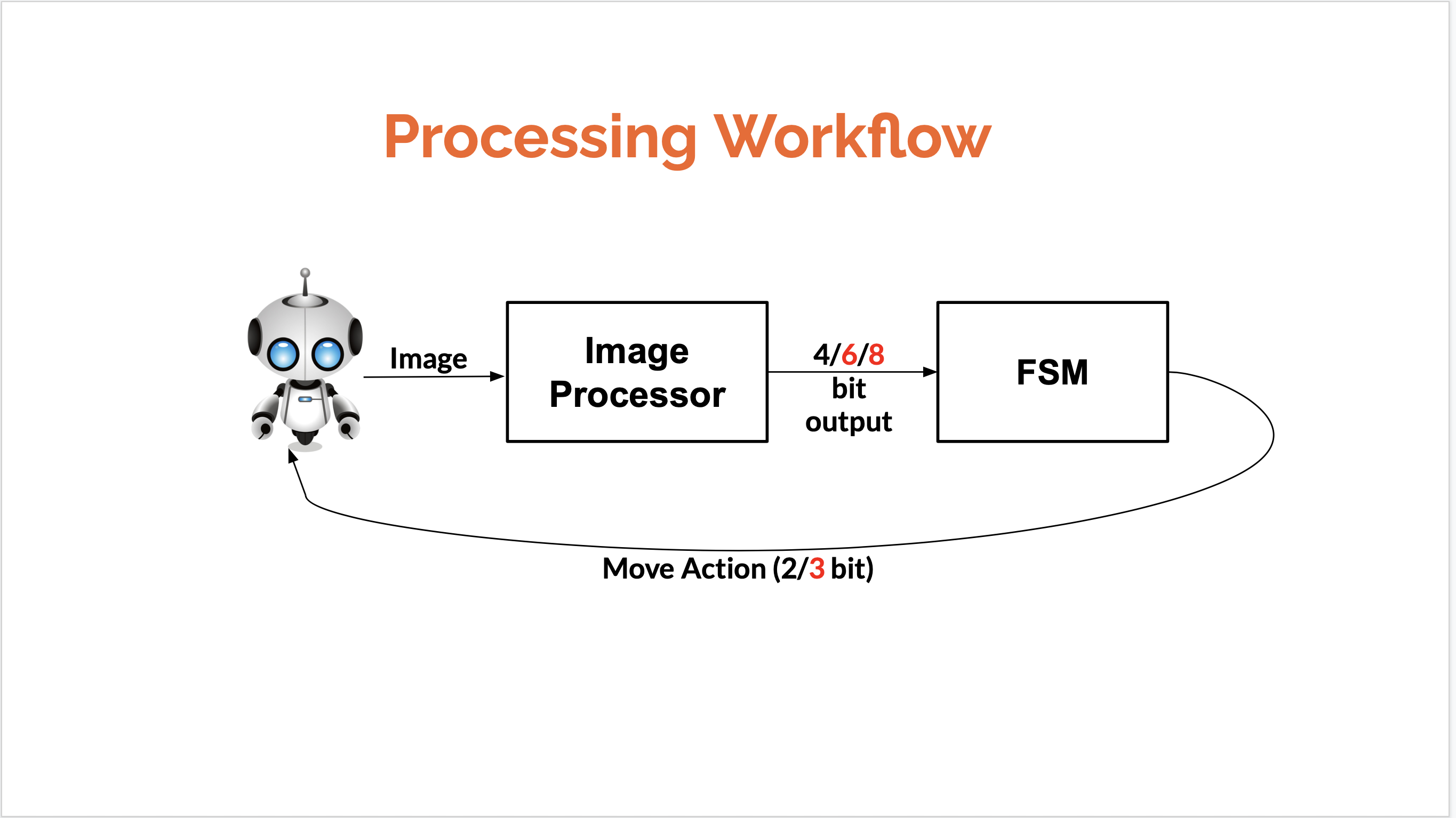
The WOXBOT character is an intelligent agent with a simulated visual sensor to pick images of the environment from its point of observation.
The image processor inside the agent analyze these images classifying the visual patterns. These outputs are tokens fed into the agent control system, which is an FSM.
Based on the above codes, the FSM chooses an action from its repertory. It is set initially with a random structure that is improved based on evolutionary computation concepts.
The FSM is represented by a string of bits coding its states, inputs and actions. This string is named the WOXBOT chromosome. For each FSM state there is a chromosome section. All these sections have the same structure: for each of the 16 possible inputs, there is an entry on the chromosome state section, composed by code of the action taken upon the given input.
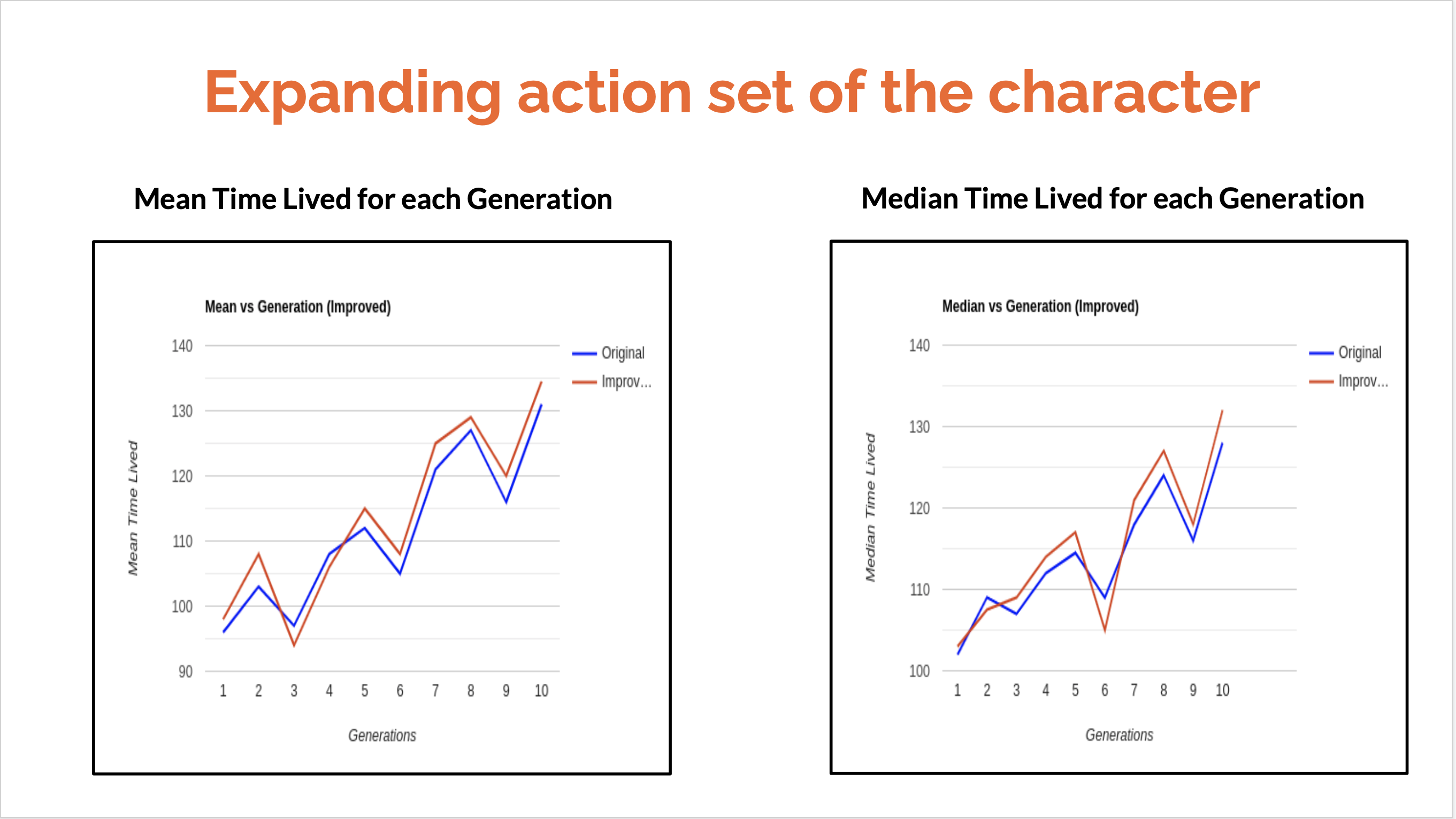
In the original implementation, the woxbot could only perform 4 actions based on the input ( Straight, Turn Left, Turn Right and Backwards ) In our improved implementation, we’ve added two more actions that can be performed by the woxbot i.e Strafe Left and Strafe Right. With this, we are getting better results in terms of average life lived by the woxbot generations.