We read every piece of feedback, and take your input very seriously.
To see all available qualifiers, see our documentation.
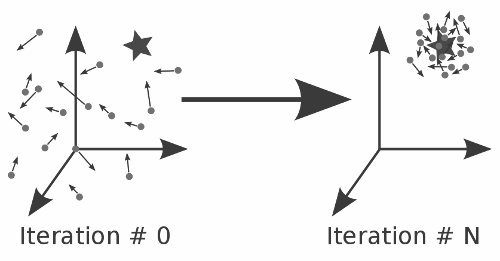
Calculating the speed for next iteration:
V{t+1} = w × Vt + c1 × r1 × (Pt - Xt) + c2 × r2 × (Gt - Xt)
c1 = c2 for balancing exploration and exploitation
Calculating the position for the next iteration:
V{t+1} = Xt + Vt