{kind=link}
This repository contains code associated with the paper "Julia for Robotics: Simulation and Real-time Control in a High-level Programming Language", submitted to ICRA 2019.
The video associated with the paper can be found here.
Main packages discussed in the paper:
- RigidBodyDynamics.jl: rigid body dynamics library.
- MeshCat.jl: 3D visualizer.
- RigidBodySim.jl: a simulation environment.
- Parametron.jl: optimization framework.
- QPControl.jl: QP-based low-level control algorithms.
Additional relevant packages:
- StrandBeestRobot.jl: simulation of a strandbeest-like mechanism, used to create Fig. 3.
- LCMCore.jl: bindings to the LCM (Lightweight Communications and Marshalling) message passing library.
- QPWalkingControl.jl: a walking controller for Atlas based on QPControl.jl (under development).
To run benchmarks and notebooks locally, simply clone the package and follow the instructions below.
- benchmarks/dynamics: code used to benchmark RigidBodyDynamics.jl and RBDL (Table I).
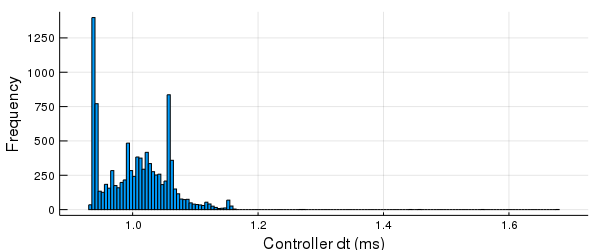
- benchmarks/controller: controller benchmark code (used to create Fig. 6).
Please see the associated README.md for information on how to run these benchmarks.
The figure below shows an additional quick benchmark result for the standing controller that does not include network communication using LCMCore.jl, as opposed to the figure in the paper. There is one sample at 1.67 ms.
The notebooks directory contains the Jupyter notebook used to generate Fig. 4.
Most of the packages listed above also have a notebooks directory with usage examples.