Recomendations for Hardware? #19
Comments
|
Hi Phil, Get a depth sounder that can output NMEA0183, and connect it via the freeboard interface board NMEA ports. There is support for a cool depth sounder with a sparkline and alarm depth in latest Freeboard courtesy of Ron Berliner :-) Rob |
|
Is there anything special about logs? |
|
Basically any suitable paddlewheel can be connected to the log connectors. They work by hall effect or need switch , so they do vary. 2 Wires is a reed switch, More is hallsensor. |
|
Take a look at the Actrisense instruments. They have a device that powers On Wed, Jun 8, 2016 at 1:05 AM, rob42 [email protected] wrote:
R. Berliner e-mail: [email protected] www.InstrumentationAssociates.com http://www.InstrumntationAssociates.com Tel 734-646-5318 |
|
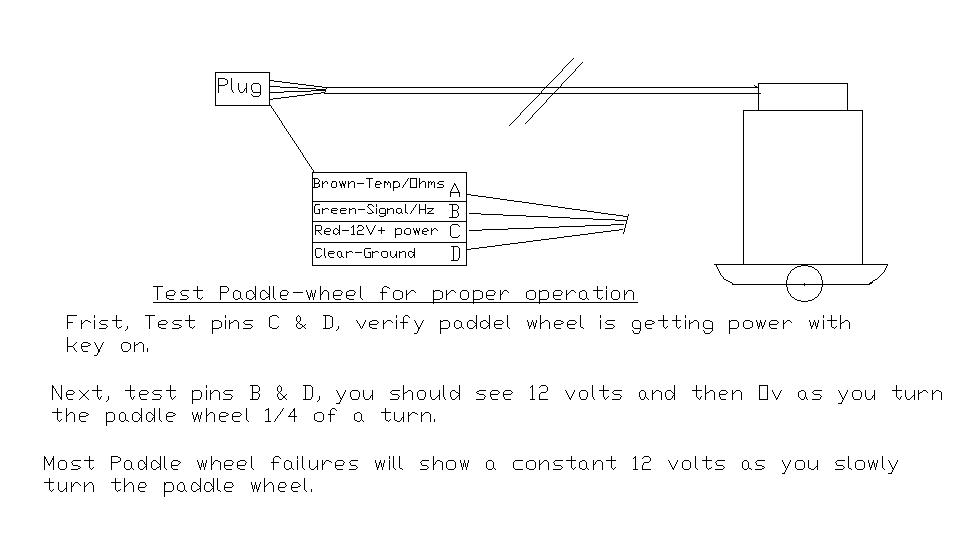
This shows the basic operation https://www.bakesonline.com/images/MediaLibrary/PaddleWheelTest.jpg |
{kind=link}
|
And for airmar http://www.catalina320.com/article.php?story=speedotesting |
|
The freeboardPLC code for the arduino doesnt currently have a log function, but adding it should be pretty simple. Its just a count of pulses/time to get a basic reading. Multiply that by a factor to get the calibration right. |
|
I have a NMEA0183 Depth Sounder, but not seeing any data coming through in the logs when I hook it up. I have connected the device to +12V and ground, and put the NMEA Out fromthe device to NMEA1's RX connection on the board. Am I missing something? thanks. |
|
Check the baud rate that the depth sounder uses. It must match the NMEA1 baud, which is 9600bps. If the depth sounder cant be changed to 9600 you can change the freeboard interface by connecting with a terminal and sending "#SB2=4800" (without the ""). I usually use the arduino ide serial console. Rob September 25 2016 6:57 AM, "Philip Freeman" wrote: You are receiving this because you commented. |
|
Yup it was totally the baud rate, since the device has nothing but 3 wires coming out of it, I don't think there's a way to change it, but setting the port's rate to 4800 on the Arduino did the trick! Thanks |
I'm building out a freeboard-server nav system for my boat. I have no working electronics currently, so I've acquired a GPS and and the peet brothers anemometer in addition to the Raspberry Pi, Arduino and Freeboard Interface Board V1.2.
In my testing, the GPS Unit and Wind instrument seem to work great out of the box. I'm currently looking to get a depth sounder and paddle wheel speed sensor. Any recommendations on how to get compatible hardware and hook it up?
The text was updated successfully, but these errors were encountered: