| layout | title | categories | author |
|---|---|---|---|
post |
工程日志🛠 |
study |
Jixiang Zhang |
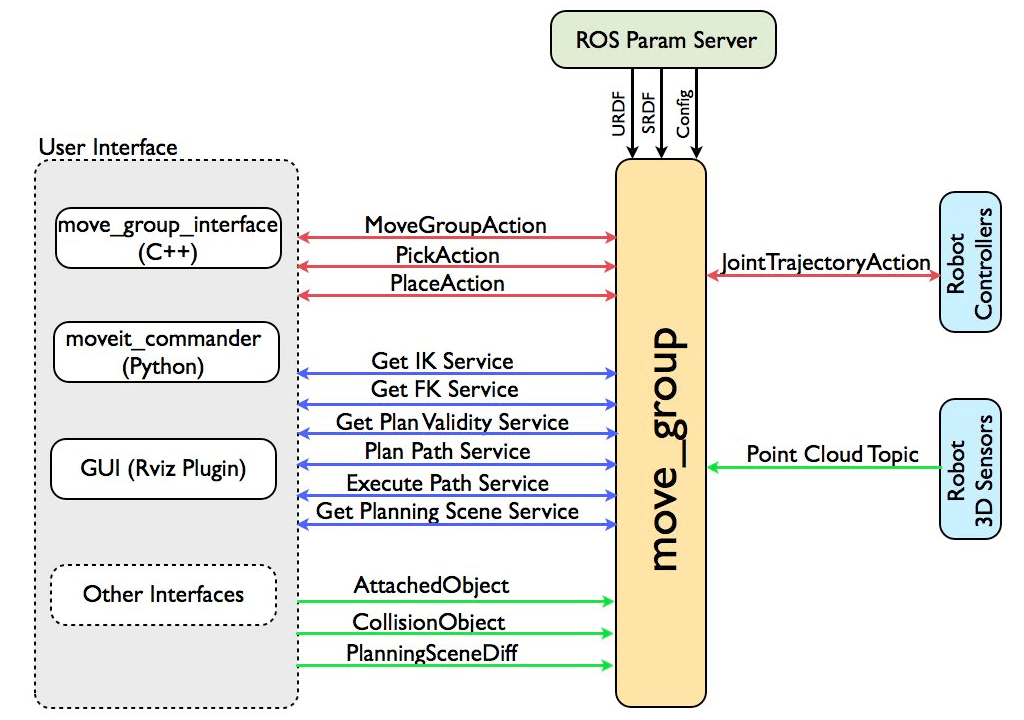
原文链接 一起做RGB-D SLAM (3)
使用 CLion,强烈推荐,比 Qt Creator 好用。调试终止在 solvePnPRansac 函数:
OpenCV Error: Assertion failed (confidence > 0 && confidence < 1) in run, file /Users/zhangjixiang/Downloads/opencv-3.3.1/modules/calib3d/src/ptsetreg.cpp, line 178`
`libc++abi.dylib: terminating with uncaught exception of type cv::Exception: /Users/zhangjixiang/Downloads/opencv-3.3.1/modules/calib3d/src/ptsetreg.cpp:178: error: (-215) confidence > 0 && confidence < 1 in function run程序源码:
cv::solvePnPRansac( pts_obj, pts_img, cameraMatrix, cv::Mat(), rvec, tvec, false, 100, 1.0, 100, inliers );错误原因:参数 confidence 超出了 (0, 1) 范围。
程序改为:
cv::solvePnPRansac( pts_obj, pts_img, cameraMatrix, cv::Mat(), rvec, tvec, false, 100, 1.0, 0.99, inliers );可正常运行。
Bug来源:多余的括号
string value = str.substr((pos+1, str.length()));运行时错误:
OpenCV Error: Assertion failed (npoints >= 4 && npoints == std::max(ipoints.checkVector(2, 5), ipoints.checkVector(2, 6))) in solvePnPRansac, file /Users/zhangjixiang/Downloads/opencv-3.3.1/modules/calib3d/src/solvepnp.cpp, line 252
libc++abi.dylib: terminating with uncaught exception of type cv::Exception: /Users/zhangjixiang/Downloads/opencv-3.3.1/modules/calib3d/src/solvepnp.cpp:252: error: (-215) npoints >= 4 && npoints == std::max(ipoints.checkVector(2, 5), ipoints.checkVector(2, 6)) in function solvePnPRansac
程序可修改为:
string value = str.substr(pos+1, str.length());导致异常的代码:
pcl::visualization::CloudViewer viewer("viewer");
viewer.showCloud(output);
while(!viewer.wasStopped())
{
}运行时出错提示:
2018-01-31 19:30:31.598 joinPointCloud[57826:4712504] *** Assertion failure in +[NSUndoManager _endTopLevelGroupings], /BuildRoot/Library/Caches/com.apple.xbs/Sources/Foundation/Foundation-1450.16/Foundation/Misc.subproj/NSUndoManager.m:361
2018-01-31 19:30:31.599 joinPointCloud[57826:4712504] *** Terminating app due to uncaught exception 'NSInternalInconsistencyException', reason: '+[NSUndoManager(NSInternal) _endTopLevelGroupings] is only safe to invoke on the main thread.'
*** First throw call stack:
(
0 CoreFoundation 0x00007fff551cc00b __exceptionPreprocess + 171
1 libobjc.A.dylib 0x00007fff7be59c76 objc_exception_throw + 48
2 CoreFoundation 0x00007fff551d1da2 +[NSException raise:format:arguments:] + 98
3 Foundation 0x00007fff572de260 -[NSAssertionHandler handleFailureInMethod:object:file:lineNumber:description:] + 193
4 Foundation 0x00007fff5726cdb4 +[NSUndoManager(NSPrivate) _endTopLevelGroupings] + 469
5 AppKit 0x00007fff5271de56 -[NSApplication run] + 997
6 libpcl_visualization.1.8.dylib 0x0000000105611c50 _ZN3pcl13visualization13PCLVisualizer8spinOnceEib + 318
7 libpcl_visualization.1.8.dylib 0x00000001056323a1 _ZN3pcl13visualization11CloudViewer16CloudViewer_implclEv + 699
8 libboost_thread-mt.dylib 0x00000001017902ac _ZN5boost12_GLOBAL__N_1L12thread_proxyEPv + 156
9 libsystem_pthread.dylib 0x00007fff7ccd46c1 _pthread_body + 340
10 libsystem_pthread.dylib 0x00007fff7ccd456d _pthread_body + 0
11 libsystem_pthread.dylib 0x00007fff7ccd3c5d thread_start + 13
)
libc++abi.dylib: terminating with uncaught exception of type NSException
解决方法:用PCLVisualizer代替CloudViewer
#include <pcl/visualization/pcl_visualizer.h>
...
pcl::visualization::PCLVisualizer viewer("viewer");
viewer.addPointCloud<pcl::PointXYZRGBA>(output);
while(!viewer.wasStopped())
{
viewer.spinOnce();
}类似的错误同样发生在ORB_SLAM2
auto resultFuture = async(launch::async, processing, argv, &SLAM);异常原因:
- 线程Thread
- UI
导致异常的代码:
pcl::visualization::CloudViewer viewer("viewer");
...
if ( visualize == true )
viewer.showCloud( cloud );解决方法:用PCLVisualizer代替CloudViewer
参考程序:
pcl::visualization::PCLVisualizer viewer("viewer");
...
if ( visualize == true )
{
viewer.removeAllPointClouds();
viewer.addPointCloud( cloud, "hello");
viewer.updatePointCloud( cloud, "hello" );
viewer.spinOnce(0.0000000000001);
}附赠一个bug:漏写函数返回值,运行时异常停止,提示函数的参数错误:
OpenCV Error: Assertion failed (npoints >= 4 && npoints == std::max(ipoints.checkVector(2, 5), ipoints.checkVector(2, 6))) in solvePnPRansac, file /Users/zhangjixiang/Downloads/opencv-3.3.1/modules/calib3d/src/solvepnp.cpp, line 252
libc++abi.dylib: terminating with uncaught exception of type cv::Exception: /Users/zhangjixiang/Downloads/opencv-3.3.1/modules/calib3d/src/solvepnp.cpp:252: error: (-215) npoints >= 4 && npoints == std::max(ipoints.checkVector(2, 5), ipoints.checkVector(2, 6)) in function solvePnPRansac
修改建议:
inline static CAMERA_INTRINSIC_PARAMETERS getDefaultCamera()
{
ParameterReader pd;
CAMERA_INTRINSIC_PARAMETERS camera;
camera.fx = atof(pd.getData("camera.fx").c_str());
camera.fy = atof(pd.getData("camera.fy").c_str());
camera.cx = atof(pd.getData("camera.cx").c_str());
camera.cy = atof(pd.getData("camera.cy").c_str());
camera.scale = atof(pd.getData("camera.scale").c_str());
return camera;// Bug
}CLion IDE 优点和缺点一样明显:
- 代码补全
- 支持CMake
- 跳转
- 方便代码查看
- 慢,不能容忍!
故提出替代方案:CMake + GCC + LLDB + Sublime Text
替代方案的优点:
- 快,爽!
- 灵活
- 支持基本调试功能
IDE 不过是偷偷地帮你调用了 GCC,LLDB……
调试方法
$ gdb ./my_program # Start GDB on your program
> run # Start running your program
... # Now reproduce the crash!
> bt # Obtain the backtrace资料与参考文献:
slambook/project/0.4/CMakeLists.txt
set( CMAKE_BUILD_TYPE "Debug" )
set( CMAKE_CXX_FLAGS "-std=c++11 -march=native -O3" )导致运行时错误
Assertion failed: (( ((internal::UIntPtr(m_data) % internal::traits<Derived>::Alignment) == 0) || (cols() * rows() * innerStride() * sizeof(Scalar)) < internal::traits<Derived>::Alignment ) && "data is not aligned"), function checkSanity, file /usr/local/include/eigen3/Eigen/src/Core/MapBase.h, line 191.
修改CMakeLists.txt为
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11" )可正常运行。原因:编译器优化导致的内存对齐错误?
但运行终止于
****** loop 347 ******
extract keypoints cost time: 0.008442
descriptor computation cost time: 0.008491
good matches: 10
match cost time: 0.001327
pnp inliers: 8
T_c_w_estimated_:
-0.0794355 -0.220607 0.972123 2.80445
0.0189232 0.974695 0.222737 4.95924
-0.99666 0.0360889 -0.0732508 -0.908356
0 0 0 1
reject because inlier is too small: 8
VO costs time: 0.021043
****** loop 348 ******
extract keypoints cost time: 0.009256
descriptor computation cost time: 0.007454
good matches: 2
match cost time: 0.000996
OpenCV Error: Assertion failed (npoints >= 4 && npoints == std::max(ipoints.checkVector(2, 5), ipoints.checkVector(2, 6))) in solvePnPRansac, file /Users/zhangjixiang/Downloads/opencv-3.3.1/modules/calib3d/src/solvepnp.cpp, line 252
libc++abi.dylib: terminating with uncaught exception of type cv::Exception: /Users/zhangjixiang/Downloads/opencv-3.3.1/modules/calib3d/src/solvepnp.cpp:252: error: (-215) npoints >= 4 && npoints == std::max(ipoints.checkVector(2, 5), ipoints.checkVector(2, 6)) in function solvePnPRansac
原因:匹配点数目不够导致的程序终止。
Solution:增加匹配数目,将 100 增加为 200
if ( match_2dkp_index_.size() < 200 )
addMapPoints();#if defined(__APPLE__)
#include <OpenGL/gl.h>
#include <OpenGL/glu.h>
#else
#include <GL/gl.h>
#include <GL/glu.h>
#endif\usepackage{listings}
\usepackage{xcolor}
\lstset{
% numbers=left,
numberstyle= \tiny,
keywordstyle= \color{ blue!70},
commentstyle= \color{red!50!green!50!blue!50},
frame=shadowbox, % 阴影效果
rulesepcolor= \color{ red!20!green!20!blue!20} ,
escapeinside=``, % 英文分号中可写入中文
% xleftmargin=2em,xrightmargin=2em, aboveskip=1em,
% framexleftmargin=2em
}
...
\begin{lstlisting}
Hello World!
\end{lstlisting}
...\cite{...}
...
\bibliographystyle{ieeetr}
\bibliography{name-of-bibtex-file}\usepackage{abstract}
\providecommand{\keywords}[1]{\textbf{\textit{Index terms---}} #1}
...
\begin{abstract}
There is the abstract...
\end{abstract}
\begin{keywords}
Some keywords...
\end{keywords}\mathop{XXX}\limits_{XXX}\documentclass{article}
\usepackage{graphicx}
\usepackage{caption}
\usepackage{subcaption}
\begin{document}
\begin{figure}
\centering
\begin{subfigure}{0.4\textwidth} % width of left subfigure
\includegraphics[width=\textwidth]{rncalt.png}
\caption{RNC} % subcaption
\end{subfigure}
\vspace{1em} % here you can insert horizontal or vertical space
\begin{subfigure}{0.4\textwidth} % width of right subfigure
\includegraphics[width=\textwidth]{dncalt.png}
\caption{DNC} % subcaption
\end{subfigure}
\caption{Wordcloud of national conventions} % caption for whole figure
\end{figure}
\end{document}\begin{equation}
\left\{
\begin{aligned}
a_{x}&=K_{A}\theta_{x}+K_{AV}\dot{\theta}_{x}+K_{T}(x-x_{0})+K_{V}v_{x}\\
a_{y}&=K_{A}\theta_{y}+K_{AV}\dot{\theta}_{y}+K_{T}(y-y_{0})+K_{V}v_{y}
\end{aligned}
\right.
\end{equation}\usepackage{hyperref}\rule{\textwidth}{1mm}\vspace{3ex}\usepackage{booktabs}
\toprule[2pt]
\midrule[1pt]
\bottomrule[2pt]\underbrace{\frac{\Delta x_1}{\Delta p_1}}_{\text{Tot eff}}{}^{e}\dot{p}#include <ctime>
...
clock_t time_stt = clock(); // 计时
...
cout <<"time use is " << 1000* (clock() - time_stt)/(double)CLOCKS_PER_SEC << "ms"<< endl;clock()函数的功能: 这个函数返回从“开启这个程序进程”到“程序中调用C++ clock()函数”时之间的CPU时钟计时单元(clock tick)数当程序单线程或者单核心机器运行时,这种时间的统计方法是正确的。但是如果要执行的代码多个线程并发执行时就会出问题,因为最终end-begin将会是多个核心总共执行的时钟嘀嗒数,因此造成时间偏大。
Solution
#include <chrono>
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
...
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>( t2-t1 );
cout<<"time use in Tracking is "<< time_used.count() * 1000 <<"ms "<<endl;孙师兄回国给大家分享他博士期间的科研成果,强调矩阵论的重要性。讲座笔记
https://matheecs.tech/images/20180523.jpeg
第二天上午师兄给课题组组织分享会,几点收获:掌握矩阵和优化,Just do it 赶走拖延症,英语很重要!
- Zynq + xfOpenCV + Stereo Vision Pipeline
- GPU TX2
在此基础上设计一款双目视觉教育机器人。
FPGA重新学习需要时间,但不想在硬件上面花太多时间,还是专注算法和创意。
每一个领域(双目视觉)都是坑,一不小心就跳下去出不来了~
- 生成高精度地图
- 用于导航,但导航真的需要高精度的地图吗
- 同理,里程计的高精度对于一般的robot重要吗
或许robot不需要高精度的里程计和地图,robot应更像人一样,而不是机器。
所以想到设计一个 low resolution vision 的 autonomous navigation mobile robot~
树莓派需要先修改软件源、安装依赖库。
$ cmake \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_INSTALL_PREFIX=/usr/local \
-DOPENCV_EXTRA_MODULES_PATH=/Users/zhangjixiang/Downloads/opencv_contrib-3.4.0/modules \
-DWITH_CUDA=OFF \
-DBUILD_DOCS=OFF \
-DBUILD_EXAMPLES=OFF \
-DBUILD_TESTS=OFF \
-DBUILD_PERF_TESTS=OFF \
..
$ make -j4
$ sudo make installclang++ -std=c++11 edX.cpp
clang++ -std=c++17 edX.cpp$ brew edit valgrind
'https://sourceware.org/git/valgrind.git'->'git://sourceware.org/git/valgrind.git'
$ brew update
$ brew install --HEAD valgrind参考 How to Install Valgrind on macOS High Sierra
使用方法
gcc main.cpp -g
valgrind --tool=memcheck --leak-check=full --show-reachable=yes ./a.out文件 libcreate/src/serial_query.cpp 中
tcflush(port.lowest_layer().native(), TCIFLUSH);修改为
tcflush(port.lowest_layer().native_handle(), TCIFLUSH);文件 libcreate/src/data.cpp 中添加
#include <iostream>否则提示错误
error: no member named 'cout' in namespace 'std'
make
make installInstallingGoolgeTestForMac.wiki
推测原因:电流 (1.8A) 不足。
Any standard USB adapter (such as a cell phone wall charger) with at least 2A of current can be used as a power supply for the LattePanda.
添加 CMakeLists.txt 和 C 程序源文件后,需要修改文件:/Firmware/cmake/configs/nuttx_px4fmu-v2_default.cmake
examples/px4_simple_appcmake_minimum_required(VERSION 2.8)
project(mynteye_sdk_samples)
include(${PROJECT_SOURCE_DIR}/cmake/Common.cmake)
include(${PROJECT_SOURCE_DIR}/cmake/DetectCXX11.cmake)
include(${PROJECT_SOURCE_DIR}/cmake/DetectOpenCV.cmake)
# flags
SET(CMAKE_BUILD_TYPE Release)
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3")
# variables
set(SDK_DIR /Users/zhangjixiang/mynteye-1.8-mac-x64-opencv-3.4.0)
set(SDK_LIB_DIR ${SDK_DIR}/lib)
set(LIB_MYNTEYE_CORE ${CMAKE_SHARED_LIBRARY_PREFIX}mynteye_core${CMAKE_SHARED_LIBRARY_SUFFIX})
message(STATUS "SDK_DIR: ${SDK_DIR}")
message(STATUS "SDK_LIB_DIR: ${SDK_LIB_DIR}")
message(STATUS "LIB_MYNTEYE_CORE: ${LIB_MYNTEYE_CORE}")
# required
include_directories( ${SDK_DIR}/include )
# camera
add_executable(camera camera.cc)
target_link_libraries(camera
${SDK_LIB_DIR}/${LIB_MYNTEYE_CORE}
${OpenCV_LIBS}
)C++ 源代码:
#include <iomanip>
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include "camera.h"
#include "utility.h"
using namespace std;
using namespace mynteye;
int main(int argc, char const *argv[]) {
std::string name;
if (argc >= 2) {
name = argv[1];
} else {
bool found = false;
name = FindDeviceName(&found);
}
cout << "Open Camera: " << name << endl;
Camera cam;
InitParameters params(name);
cam.Open(params);
if (!cam.IsOpened()) {
std::cerr << "Error: Open camera failed" << std::endl;
return 1;
}
std::cout << "\033[1;32mPress ESC/Q on Windows to terminate\033[0m\n";
double t, fps = 0;
ErrorCode code;
cv::Mat img_left;
for (;;) {
t = (double)cv::getTickCount();
code = cam.Grab();
if (code != ErrorCode::SUCCESS) continue;
if (cam.RetrieveImage(img_left, View::VIEW_LEFT_UNRECTIFIED) == ErrorCode::SUCCESS)
{
// top left: width x height
stringstream ss;
ss << img_left.cols << "x" << img_left.rows;
DrawInfo(img_left, ss.str(), Gravity::TOP_LEFT);
// top right: fps
ss.str(""); ss.clear();
ss << fixed << setw(7) << setprecision(2) << setfill(' ') << fps;
DrawInfo(img_left, ss.str(), Gravity::TOP_RIGHT);
cv::imshow("left", img_left);
}
char key = (char) cv::waitKey(1);
if (key == 27 || key == 'q' || key == 'Q') { // ESC/Q
cv::imwrite("left.jpg",img_left);
cout << "Saved Images!" << endl;
break;
}
t = (double)cv::getTickCount() - t;
fps = cv::getTickFrequency() / t;
}
cam.Close();
cv::destroyAllWindows();
return 0;
}pip install tensorflow # Python 2.7; CPU supportssh-keygen -R hostname点击通知,找到并进入“所有设置”
在所有设置中找到并进入“更新和安全”
找到恢复,点击“高级启动”下的“立即重启”,重启电脑
重启后选择“疑难解答”
选择“高级选项”
选择“启动设置”
点击“重启”
按提示输入“7”禁用驱动程序强制签名
pandoc -s document.tex -o word.docx\usepackage{pdfpages}
...
\includepdf[pages=-,pagecommand={},width=\textwidth]{file.pdf}$ sudo nano /etc/apt/sources.list
deb http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ stretch main non-free contrib
deb-src http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ stretch main non-free contribsudo apt-get install --no-install-recommends xserver-xorg
sudo apt-get install --no-install-recommends xinit
sudo apt-get install raspberrypi-ui-mods
sudo apt-get install lightdm$ sudo vim /etc/dphys-swapfile
...
修改 CONF_SWAPSIZE=2048
...
$ sudo /etc/init.d/dphys-swapfile restart相机设备 /dev/video0
sudo modprobe bcm2835-v4l2
if ( (char) cv::waitKey(33) >= 0 )
break;
修改为:
if ( cv::waitKey(33) >= 0 )
break;掌握 gdb 单步调试
<html>
<body>
<embed src="/Users/zhangjixiang/Downloads/dirtran_mintime_double_integrator_fine.swf" width="100%" height="100%"></embed>
</body>
</html>import serial
from time import sleep
from flask import request
from flask import Flask
app = Flask(__name__)
ser = serial.Serial('/dev/tty.usbmodem1411', 9600, timeout=1)
@app.route("/", methods = ['POST', 'GET'])
def hello():
if request.method == 'POST':
print request.form['submit']
# ser = serial.Serial('/dev/tty.usbmodem1411', 9600, timeout=1)
if request.form['submit'] == 'ON':
print '1'
ser.write(b'1')
elif request.form['submit'] == 'OFF':
print '0'
ser.write(b'0')
else:
pass # unknown
return '<form action="/" method="POST"><input type="submit" name="submit" value="ON"><input type="submit" name="submit" value="OFF"></form>'
if __name__ == "__main__":
# app.run()
app.run(host='0.0.0.0')import serial
import time
from struct import *
mega = serial.Serial(port='/dev/cu.usbmodem1421',
baudrate=9600, timeout = 3.0)
try:
while True:
raw = raw_input('input a char: ')
mega.write(pack('c',raw))
# read a '\n' terminated line
line = mega.readline()
print line
except Exception as e:
mega.close()
需要添加两个文件:文件和图标
-
/usr/share/applications/xxx.desktop,例如
[Desktop Entry] Name=KDEnlive Comment=Non Linear Video Editor GenericName=Video Editor Exec=/home/ajith/Applications/Kdenlive-17.12.0d-x86_64.AppImage #make sure to change the below path to the path in your system Icon=kdenlive #the icon name for your application will be different Type=Application StartupNotify=true Categories=Qt;KDE;AudioVideo;AudioVideoEditing; MimeType=application/x-kdenlive; -
/usr/share/icons/hicolor/512x512/apps/xxx.png
SFTP = SSH File Transfer Protocol
sudo apt-get update
sudo apt-get install openssh-server
sudo ufw allow 22pandoc -s example4.tex -o example5.text原因:debug模式
Solution:输入c,然后回车执行
<bochs:1> cpython -m pip uninstall pipimport timeit
start = timeit.default_timer()
#Statements
stop = timeit.default_timer()
print('Time: ', stop - start)ssh-keygen -R <host>#include <signal.h>
...
void myfunction(int sig) {
...
exit(1);
}
int main(int argc, char** argv) {
signal(SIGINT, myfunction);
...
}查找所有文件中的内容
$ grep -rnw '/path/to/somewhere/' -e 'pattern'
$ grep -Ril "text-to-find-here" /
查找指定文件名
$ find /home/username/ -name "*.err"ss 偏好设置->HTTP->HTTP代理监听地址->修改为0.0.0.0。
代理服务器主机名写运行 ss 的电脑的 IP 地址。
sudo adduser username
usermod -aG sudo username
su - usernamecatkin_make messages_generate_messages
catkin_makedpkg -l | grep libopencvnvcc --versioncat /usr/local/cuda/include/cudnn.h | grep CUDNN_MAJOR -A 2$ pkg-config --cflags librtmp
$ pkg-config --libs librtmp
常用参数:
–-list-all 列出所有已安装的共享库
-–cflags 列出指定共享库的预处理和编译flag
-–libs 列出指定共享库的链接flagimport re
import numpy as np
import matplotlib as mpl
import matplotlib.pyplot as plt
# read the log file
files = ['00.txt', '01.txt', '02.txt', '03.txt']
iters = [8000, 80000, 8000, 20000]
descr = ['00iter: [8000,4000,8000,4000] base_lr: 0.001', '01iter: [80000,40000,80000,40000] base_lr: 0.0005', '02iter: [8000,4000,8000,4000] base_lr: 0.0005', '03iter: [20000,10000,20000,10000] base_lr: 0.0005']
color = ['green', 'red', 'skyblue', 'blue']
plt.title('Result Analysis')
for i in range(4):
file_log = open(files[i], 'r')
train_iterations = []
train_loss = []
for line in file_log:
if '] Iteration ' in line and 'loss = ' in line:
arr = re.findall(r'ion \b\d+\b',line)
train_iterations.append(int(arr[0].strip(',')[4:]))
train_loss.append(float(line.strip().split(' = ')[-1]))
file_log.close()
print len(train_iterations)
plt.plot(train_iterations[0:iters[i] / 20], train_loss[0:iters[i] / 20], color=color[i], label=descr[i])
plt.legend()
plt.xlabel('iteration times')
plt.ylabel('loss')
plt.xlim(-20, 2000)
plt.show()% add gauss and peper noise
% 2019-02-23
clc
clear all
XmlPath = 'dataset/xml/';
XmlFile = dir(fullfile(XmlPath, '*.xml'));
XmlNames = transpose({XmlFile.name});
Amount = size(XmlNames, 1);
PicPath = 'dataset/';
for k = 1:Amount
filename = fullfile(XmlPath, XmlNames(k));
XDoc = xmlread(char(filename));
xmin = XDoc.getElementsByTagName('object').item(0).getElementsByTagName('xmin').item(0).getFirstChild.getNodeValue; xmin = str2num(xmin);
ymin = XDoc.getElementsByTagName('object').item(0).getElementsByTagName('ymin').item(0).getFirstChild.getNodeValue; ymin = str2num(ymin);
xmax = XDoc.getElementsByTagName('object').item(0).getElementsByTagName('xmax').item(0).getFirstChild.getNodeValue; xmax = str2num(xmax);
ymax = XDoc.getElementsByTagName('object').item(0).getElementsByTagName('ymax').item(0).getFirstChild.getNodeValue; ymax = str2num(ymax);
ap = [xmin, ymin, xmax, ymax]
XmlName = char(XmlNames(k));
PicName = strcat(XmlName(1:6), '.jpg');
origin = imread(PicName);
% r = [0 ~ 0.2]
r = randi([0 200],1,3)/1000
I_0 = imnoise(origin, 'salt & pepper', r(1));
Im = imnoise(I_0, 'gaussian', r(2), r(3));
[rNum,cNum] = size(Im);
x1 = (xmin+xmax)/2; y1 = (ymin+ymax)/2; radius = (xmax+ymax-xmin-ymin)/4;
[xx,yy] = ndgrid((1:rNum)-y1,(1:cNum)-x1);
mask = (xx.^2 + yy.^2) >= radius^2+10^2;
Im(mask) = uint8(0);
imwrite(Im, fullfile('newdataset/', PicName))
end/* strtok example */
#include <stdio.h>
#include <string.h>
int main ()
{
char str[] ="- This, a sample string.";
char * pch;
printf ("Splitting string \"%s\" into tokens:\n",str);
pch = strtok (str," ,.-");
while (pch != NULL)
{
printf ("%s\n",pch);
pch = strtok (NULL, " ,.-");
}
return 0;
}Latency Comparison Numbers (~2012)
----------------------------------
L1 cache reference 0.5 ns
Branch mispredict 5 ns
L2 cache reference 7 ns 14x L1 cache
Mutex lock/unlock 25 ns
Main memory reference 100 ns 20x L2 cache, 200x L1 cache
Compress 1K bytes with Zippy 3,000 ns 3 us
Send 1K bytes over 1 Gbps network 10,000 ns 10 us
Read 4K randomly from SSD* 150,000 ns 150 us ~1GB/sec SSD
Read 1 MB sequentially from memory 250,000 ns 250 us
Round trip within same datacenter 500,000 ns 500 us
Read 1 MB sequentially from SSD* 1,000,000 ns 1,000 us 1 ms ~1GB/sec SSD, 4X memory
Disk seek 10,000,000 ns 10,000 us 10 ms 20x datacenter roundtrip
Read 1 MB sequentially from disk 20,000,000 ns 20,000 us 20 ms 80x memory, 20X SSD
Send packet CA->Netherlands->CA 150,000,000 ns 150,000 us 150 ms
Notes
-----
1 ns = 10^-9 seconds
1 us = 10^-6 seconds = 1,000 ns
1 ms = 10^-3 seconds = 1,000 us = 1,000,000 ns
Credit
------
By Jeff Dean: http://research.google.com/people/jeff/
Originally by Peter Norvig: http://norvig.com/21-days.html#answers
Contributions
-------------
'Humanized' comparison: https://gist.github.com/hellerbarde/2843375
Visual comparison chart: http://i.imgur.com/k0t1e.png
用 cloc 统计代码量
prompt> cloc gcc-5.2.0/gcc/c
16 text files.
15 unique files.
3 files ignored.
https://github.com/AlDanial/cloc v 1.65 T=0.23 s (57.1 files/s, 188914.0 lines/s)
-------------------------------------------------------------------------------
Language files blank comment code
-------------------------------------------------------------------------------
C 10 4680 6621 30812
C/C++ Header 3 99 286 496
-------------------------------------------------------------------------------
SUM: 13 4779 6907 31308
-------------------------------------------------------------------------------SymPy is a Python library for symbolic mathematics. It aims to become a full-featured computer algebra system (CAS) while keeping the code as simple as possible in order to be comprehensible and easily extensible. SymPy is written entirely in Python.
brew install highlight
pbpaste | highlight --syntax=c++ -K 17 -u "utf-8" -t 2 -n -O rtf | pbcopyexport LC_ALL=en_US.UTF-8
export LANG=en_US.UTF-8https://matheecs.tech/images/Git.jpg
https://matheecs.tech/images/imumodel.jpg
sudo tlmgr install name-of-packageSolution:保留/etc/apt/sources.list默认配置,不要覆盖原有内容
:w !sudo tee %sudo apt-get install language-pack-zh*
sudo apt-get install chinese*
sudo apt-get install fonts-arphic-ukai fonts-arphic-uming fonts-ipafont-mincho fonts-ipafont-gothic fonts-unfonts-core替换brew.git:
cd "$(brew --repo)"
git remote set-url origin https://mirrors.ustc.edu.cn/brew.git
替换homebrew-core.git:
cd "$(brew --repo)/Library/Taps/homebrew/homebrew-core"
git remote set-url origin https://mirrors.ustc.edu.cn/homebrew-core.git重置
重置brew.git:
cd "$(brew --repo)"
git remote set-url origin https://github.com/Homebrew/brew.git
重置homebrew-core.git:
cd "$(brew --repo)/Library/Taps/homebrew/homebrew-core"
git remote set-url origin https://github.com/Homebrew/homebrew-core.gitmacOS Catalina 开始默认采用 zsh,配合 Oh My Zsh 十分好用。
sudo diskutil umount /dev/disk2s1
sudo dd bs=8m if=./2019-09-26-raspbian-buster-full.img of=/dev/rdisk2pip3 config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple# 新建/删除环境
conda create -n env_name python=3.7
conda remove -n env_name --all
# 激活/退出环境
conda activate env_name
conda deactivate修改软件源配置文件
sudo gedit /etc/apt/sources.list参考
# deb cdrom:[Ubuntu 16.04.2 LTS _Xenial Xerus_ - Release amd64 (20170215.2)]/ xenial main restricted
# See http://help.ubuntu.com/community/UpgradeNotes for how to upgrade to
# newer versions of the distribution.
deb http://cn.archive.ubuntu.com/ubuntu/ xenial main restricted
# deb-src http://cn.archive.ubuntu.com/ubuntu/ xenial main restricted
## Major bug fix updates produced after the final release of the
## distribution.
deb http://cn.archive.ubuntu.com/ubuntu/ xenial-updates main restricted
# deb-src http://cn.archive.ubuntu.com/ubuntu/ xenial-updates main restricted
## N.B. software from this repository is ENTIRELY UNSUPPORTED by the Ubuntu
## team. Also, please note that software in universe WILL NOT receive any
## review or updates from the Ubuntu security team.
deb http://cn.archive.ubuntu.com/ubuntu/ xenial universe
# deb-src http://cn.archive.ubuntu.com/ubuntu/ xenial universe
deb http://cn.archive.ubuntu.com/ubuntu/ xenial-updates universe
# deb-src http://cn.archive.ubuntu.com/ubuntu/ xenial-updates universe
## N.B. software from this repository is ENTIRELY UNSUPPORTED by the Ubuntu
## team, and may not be under a free licence. Please satisfy yourself as to
## your rights to use the software. Also, please note that software in
## multiverse WILL NOT receive any review or updates from the Ubuntu
## security team.
deb http://cn.archive.ubuntu.com/ubuntu/ xenial multiverse
# deb-src http://cn.archive.ubuntu.com/ubuntu/ xenial multiverse
deb http://cn.archive.ubuntu.com/ubuntu/ xenial-updates multiverse
# deb-src http://cn.archive.ubuntu.com/ubuntu/ xenial-updates multiverse
## N.B. software from this repository may not have been tested as
## extensively as that contained in the main release, although it includes
## newer versions of some applications which may provide useful features.
## Also, please note that software in backports WILL NOT receive any review
## or updates from the Ubuntu security team.
deb http://cn.archive.ubuntu.com/ubuntu/ xenial-backports main restricted universe multiverse
# deb-src http://cn.archive.ubuntu.com/ubuntu/ xenial-backports main restricted universe multiverse
## Uncomment the following two lines to add software from Canonical's
## 'partner' repository.
## This software is not part of Ubuntu, but is offered by Canonical and the
## respective vendors as a service to Ubuntu users.
# deb http://archive.canonical.com/ubuntu xenial partner
# deb-src http://archive.canonical.com/ubuntu xenial partner
deb http://security.ubuntu.com/ubuntu xenial-security main restricted
# deb-src http://security.ubuntu.com/ubuntu xenial-security main restricted
deb http://security.ubuntu.com/ubuntu xenial-security universe
# deb-src http://security.ubuntu.com/ubuntu xenial-security universe
deb http://security.ubuntu.com/ubuntu xenial-security multiverse
# deb-src http://security.ubuntu.com/ubuntu xenial-security multiverse
最后更新
sudo apt-get updatesudo spctl --master-disable
sudo xattr -r -d com.apple.quarantine /XXX/XXX.app/git clone https://github.com/google/googletest
cd googletest
mkdir build
cd build
cmake ..
make
make installsudo rm -rf /Library/Java/JavaVirtualMachines/jdk<version>.jdk
sudo rm -rf /Library/PreferencePanes/JavaControlPanel.prefPane
sudo rm -rf /Library/Internet\ Plug-Ins/JavaAppletPlugin.plugin
sudo rm -rf /Library/LaunchAgents/com.oracle.java.Java-Updater.plist
sudo rm -rf /Library/PrivilegedHelperTools/com.oracle.java.JavaUpdateHelper
sudo rm -rf /Library/LaunchDaemons/com.oracle.java.Helper-Tool.plist
sudo rm -rf /Library/Preferences/com.oracle.java.Helper-Tool.plist安装软件
brew install ffmpeg
brew cask install xquartz #dependency for gifsicle, only required for mountain-lion and above
open /usr/local/Caskroom/xquartz/2.7.11/XQuartz.pkg
brew install gifsicle生成GIF
ffmpeg -i in.mov -s 600x400 -pix_fmt rgb24 -r 10 -f gif - | gifsicle --optimize=3 --delay=3 > out.gif参考:OS X Screencast to animated GIF
SimHei 和 SimSun 可以从 Word 软件中导出安装到 macOS 系统。Word 中自带字体的路径:
/Applications/Microsoft Word.app/Contents/Resources/DFontsConfigure Visual Stuido Code as LaTeX IDE
腾讯云域名解析配置:

Note that you may have to update "Team" to your own account (General Tab -> Signing in Xcode 10 or "Signing and Capabilities" Tab -> Signing in Xcode 11). Update the Bundle Identifier if needed.
修改部分:
- Team:
xxxxxx (Personal Team) - Bundle Identifier:
xxxxxx.matheecs
- 安装
- 运行
- 原理研究
- 测试
- 最后一步研究源码
- OmniGraffle 基础入门
- B站: OmniGraffle入门教程
- B站: Omnigraffle Tutorials 官方视频
- 官方英文手册7.11
- 官方中文手册6.3
- Stenciltown 模版库

这张动态图解来自这才是真正的GIT:GIT原理及实用技巧。
sudo spctl --master-disable
sudo xattr -rd com.apple.quarantine /Applications/xxxxxx.app- Fork
- Commit & Push
- Pull Request
- CI
brew update
brew install git
brew install git-guiSQ4R = SURVEY + QUESTION + READ + RECITE + WRITE + REVIEW
taobao://s.taobao.com/?q=%@
- 连读
- 省略
t,d,and→n
- 重读

解决方法,用brew安装poppler库,替换掉texstudio程序包里的库:
/Applications/texstudio.app/Contents/Frameworks/libpoppler.*.dylib
/Applications/texstudio.app/Contents/Frameworks/libpoppler-qt*.*.dylib- 当你使用一个公共网络时要注意保护自己
- 换用一个更安全的浏览器
- 使用一个安全的电子邮件服务商
- 持续更新软件
- 选择一些不容易被猜对的密码,并安全存储它们
- 打开电子邮件附件时是有风险的,要注意防御
- 别用电话给你不认识的人发信息
- 谨慎地使用P2P下载
- 想办法为你的硬盘加密
- 要时刻保持对社会工程学攻击的警觉性
pip3 always operates on the Python3 environment only, as pip2 does with Python2. pip operates on whichever environment is appropriate to the context. For example if you are in a Python3 venv, pip will operate on the Python3 environment
pip install -r requirements.txt安卓系统默认只能识别 FAT 和 NTFS 格式,但是 macOS 不支持 NTFS 格式,需要安装软件(比如 Paragon NTFS for Mac)。FAT 要求每个文件大小不能超过 4G!
brew pin <formula>反之:
brew unpin <formula>python -m pip install opencv-python==3.4.2.16
python -m pip install opencv-contrib-python==3.4.2.16- 跟着这份清理教程,帮你的 Mac 腾出更多储存空间
- Keeping macOS clean: this is my osx/brew/… update CLI command
- 一款好用又免费的辅助清理软件:OmniDiskSweeper
export http_proxy="http://127.0.0.1:8001"
export https_proxy="http://127.0.0.1:8001"用类似的方法加速 $ git clone ...
git config --global http.proxy 'socks5://127.0.0.1:1080'
git config --global https.proxy 'socks5://127.0.0.1:1080'取消用
git config --global --unset http.proxy
git config --global --unset https.proxy解决方案:把 ASCII 改为 二进制传输!
omg-tools 绘图窗口闪退
解决方案:matplotlib.pyplot.pause(interval)[source]
解决方案:先点击 R2020a,再打开任意软件的界面,让 R2020a 在“后台”启动
set(PCL_DIR "/usr/lib/x86_64-linux-gnu/cmake/pcl") #该路径中存放*.cmake文件
find_package(PCL 1.7 REQUIRED)
Homebrew provides a formula for Python 3.x ([email protected]). The executables are organised as follows:
python3points to Homebrew’s Python 3.x (if installed)pip3points to Homebrew’s Python 3.x’s pip (if installed)
cat install_manifest.txt | sudo xargs rmsay 你好 -o out.wave#include <ros/ros.h>
#include <signal.h>
void mySigintHandler(int sig)
{
// Do some custom action.
// For example, publish a stop message to some other nodes.
// All the default sigint handler does is call shutdown()
ros::shutdown();
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "my_node_name", ros::init_options::NoSigintHandler);
ros::NodeHandle nh;
// Override the default ros sigint handler.
// This must be set after the first NodeHandle is created.
signal(SIGINT, mySigintHandler);
//...
ros::spin();
return 0;
}$ ./configure --prefix=/usr/local/Cellar/foo/1.2
$ make
$ make install
$ brew link foo
# OR
$ cmake .. DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local/Cellar/foo/1.2
$ make
$ make install
$ brew link foosudo apt install p7zip-full
7z b#include <ndt_mapping/backward.hpp>
namespace backward {
backward::SignalHandling sh;
}- CATKIN_PACKAGE_BIN_DESTINATION
- CATKIN_PACKAGE_INCLUDE_DESTINATION
- CATKIN_PACKAGE_SHARE_DESTINATION
sudo apt-get install python-bloom
cd path/to/your/catkin/package
bloom-generate rosdebian
fakeroot debian/rules binary
bloom-generate rosdebian --os-name ubuntu --os-version xenial --ros-distro kinetic
fakeroot debian/rules binary解决方法1:修改显示字体
\setCJKmainfont{Kaiti TC Regular}
\setCJKsansfont{Songti TC Regular}
\setCJKmonofont{Heiti TC Regular}解决方法2:把内置的预览器换成外部 PDF 浏览器
import os
import open3d as o3d
map_pcd_path = str(os.path.dirname(os.path.abspath(__file__))) + "/../map/yuanqu.pcd"
map_ply_path = str(os.path.dirname(os.path.abspath(__file__))) + "/../map/yuanqu.ply"
map_pcd_data = o3d.io.read_point_cloud(map_pcd_path)
o3d.visualization.draw_geometries([map_pcd_data])
o3d.io.write_point_cloud(map_ply_path, map_pcd_data)- Import the pointcloud file in ".ply" file format in Meshlab. Before importing make sure you do some pre-processing / cleaning on point cloud so as to ease the process of meshing.
- Next we need to reduce the number of point samples for smooth meshing.
- So go to Filters -> Point Set -> Point Cloud Simplification. Enter Number of samples circa 5% of original number of points. Make sure Best Sample Heuristic is checked.
- After point cloud simplification, make sure to select Simplified point cloud in the Show Layer Dialog on the right hand side. If not visible, it can opened by going to View -> Show Layer Dialog. Now we need to compute normals for point set.
- So go to Filters -> Point Set -> Compute normals for point sets . Enter Neighbour num between 10 - 100. Initially try with 10 and try to get a mesh and later see if this can be improved by increasing the neighbour number. For Smooth Iteration initially try with 0 value and may be later it can be tried with values between 5 - 10. I mostly use value 8.
- Make sure if your normals are properly computed by going to Render -> Show Normal.
- Next we are going to use Poisson Surface reconstruction to do meshing.
- So go to Filters ->Remeshing, Simplification and Reconstruction -> Screened Poisson Surface Reconstruction. Initially try with default parameters then later one can play around with reconstruction depth, number of samples and interpolation weight values.
- This will create another mesh layer called Poisson in the Show layer Dialog which has surfaces now. Make sure to select that to peform further operations.
- One can observe that it has also created some extra surfaces. To remove them go to Filters -> Selection -> Select Faces with edges longer than .... By deafult the value is automatically computed, just click on apply. Then click on delete face button (triangle face and three vertex with a cross over it). This will remove extra surfaces.
- After this operation, still some noise faces can be seen. To remove them go to Filters -> Cleaning and Repairing -> Remove isolated pieces (wrt Face Num.). Use the default value and make sure Remove unreferenced vertices is checked. This will remove some noise faces.
- Even after the above operation some noise faces are seen. To remove them go to Filters -> Selection -> Select non Manifold Vertices. Click apply. Then click on delete face button (triangle and threwe vertex with a cross over it). This will remove remaining extra faces.
-
Now that we have a mesh, next step is to get the texture for the mesh from the pointcloud.
-
Make sure to select Poisson in the Show layer Dialog to peform further operations.
-
Go to Filters -> Texture -> Per Vertex Texture Function. Click on apply.
-
Go to Filters -> Texture -> Convert PerVertex UV into PerWedge UV. Click on apply.
-
Go to Filters -> Texture -> Parametrization: trivial Per-triangle.
- Quads -per -line : 0
- Texture Dimension (px) : 4096 or (1024, 2048).
- Inter-triangle border (px) : 0
- Method : Basic (with Space-optimizing somethimes Meshlab crashes.)
- Click on Apply.
-
Now go to File -> Save Project As... Save the project in ".mlp" file format.
-
Now go to File -> Export Mesh As... Save the mesh in ".obj" file format. After clicking on save, it will open saving options. Make sure under Wedge, TexCoord is checked. Then click on OK.
-
Now go to Filters -> Texture -> Transfer: Vertex Color to Texture.
- Texture file : (If your mesh was saved as mesh_1.obj, the texture file name should be mesh_1.png)
- Texture width (px) : 4096 (make sure this is same as Texture Dimension in the above steps)
- Texture height (px) : 4096 (make sure this is same as Texture Dimension in the above steps)
- Check Assign texture and Fill texture.
- Click on Apply.
-
Now you have a textured mesh. There is also a texture image file saved in the same directory where original mesh was saved.
-
If originally you saved your mesh as mesh_1.obj, after the above operation it will create mesh_1.obj.mtl and mesh_1.png. These are the three files needed to view textured mesh on any ".obj" file viewing software like Blender or autodesk etc.
References:
rm -rf node_modules package-lock.json
npm audit fix --force
npm i --package-lock-only设置 -> 隐私 -> 本地网络
# Open the sudo utility
sudo vi /etc/pam.d/sudo
# Add the following as the first line
auth sufficient pam_tid.soCould not load panel in rviz -- PluginlibFactory: The plugin for class ...
Solution:
- You can put cpp and header files for your rviz related plugin together in one folder
- or use the technique stated above (link both source and header to your created library)
ffmpeg -i input.mp4 -r 20 -s vga -b:v 1.5M -c:v h264_videotoolbox output.mp4brew install [email protected]Error info: error: argument to '-V' is missing (expected 1 value)
cmake .. -DCMAKE_C_COMPILER='/usr/local/bin/x86_64-apple-darwin20-gcc-11.1.0'cmake .. -DCMAKE_INSTALL_PREFIX=/usrsudo ln -s /usr/include/eigen3/Eigen /usr/include/Eigen# Linux
$ sed -i "s/old/new/g" /path/to/file
# macOS
$ sed -i "" "s/old/new/g" /path/to/fileUse backward.hpp to Debug
#include <backward.hpp>
namespace backward {
backward::SignalHandling sh;
}set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_FLAGS "-std=c++11")
set(CMAKE_CXX_FLAGS_RELEASE "-O3 -Wall -g")[Proxy]
DIRECT = direct
CN1-HK = custom, HOST, PORT, ENCODE, PASSWORD, http://example.com/
EXT-HK = custom, ......
[Proxy Group]
Proxy = select, CN1-HK, EXT-HK, DIRECT
尽可能用新版本 Eigen
install(TARGETS receiver sender
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
)Issues: 安装后运行提示无法在 /opt/ros/melodic/share/XXX 路径下找到可执行节点
Solution: 修改 CATKIN_GLOBAL_BIN_DESTINATION 为 CATKIN_PACKAGE_BIN_DESTINATION
source ws/devel/setup.bash --extend
echo $ROS_PACKAGE_PATHsudo add-apt-repository ppa:ubuntu-toolchain-r/test
sudo apt-get install gcc-10 g++-10
sudo update-alternatives --remove-all gcc
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-5 90 --slave /usr/bin/g++ g++ /usr/bin/g++-5Installing newer GCC versions in Ubuntu
colcon build --symlink-install --packages-skip-by-dep python_qt_binding --packages-ignore turtlesim rviz2 rviz_visual_testing_framework rviz_default_plugins rviz_common编译失败的包
- turtlesim
- rviz_common
- rviz2
- rviz_visual_testing_framework
- rviz_default_plugins
原因:qt5 与 qt6 冲突
解决方法:删除 qt(v6)
brew uninstall qt重新编译
colcon build --symlink-install --packages-skip-by-dep python_qt_binding
colcon build --symlink-install --packages-ignore rqt_gui_cpp qt_gui_cppNote: 部分包需要修改 CMakeLists.txt 以支持 C++17 才能通过编译
set(CMAKE_CXX_STANDARD 17)加载环境
source ~/ros2_foxy/install/setup.shReferences:
转换规则
-
If the rotation we converting from is an EulerAngles, angles ranges are undefined.
-
otherwise, alpha and gamma angles will be in the range [-PI, PI]. As for Beta angle:
- If the system is Tait-Bryan, the beta angle will be in the range [-PI/2, PI/2].
- otherwise:
- If the beta axis is positive, the beta angle will be in the range [0, PI]
- If the beta axis is negative, the beta angle will be in the range [-PI, 0]
-
Eigen::EulerAngles< _Scalar, _System > Class Template Reference
-
Bug 1301 - The second angle returned from eulerAngles does not have range (-PI/2, PI/2]
spline function是一类分段(片)光滑、并且在各段交接处也有一定光滑性的函数。简称样条。样条一词来源于工程绘图人员为了将一些指定点连接成一条光顺曲线所使用的工具,即富有弹性的细木条或薄钢条。由这样的样条形成的曲线在连接点处具有连续的坡度与曲率。分段低次多项式、在分段处具有一定光滑性的函数插值就是模拟以上原理发展起来的,它克服了高次多项式插值可能出现的振荡现象,具有较好的数值稳定性和收敛性,由这种插值过程产生的函数就是多项式样条函数。

Server Parameters vs Dynamic Reconfigure?
The PRINCIPAL moments of inertia for that body about Bcm are:
[Imin = 0.0004078925; Imedium = 0.001790823; Imax = 0.002295285]
Real physical bodies require the "triangle-inequality" Imax <= Imin + Imed.
SpatialInertia::IsPhysicallyValid() fails for reasonable spatial inertia #16058
有问题的惯性张量来自 bullet3 提供的例子
<inertial>
<mass value="0.634"/>
<origin xyz="0.0 0.016 -0.02"/>
<inertia ixx="0.001983" ixy="0.000245" ixz="0.000013" iyy="0.002103" iyz="0.0000015" izz="0.000408"/>
</inertial>
Drake 开发进度严谨而高效,为 TRI 工作人员点赞👍只是经常报一些奇怪的错
costmap_2d 包删除 ObservationBuffer 对应头文件和源文件,编译通过,但是运行出错
Undefined symbol error when using tf2_ros::BufferInterface::transform
ROS 重映射功能支持 topic 和 tf 树节点
<node pkg="tf" type="tf_remap" name="tf_remapper" output="screen">
<rosparam param="mappings">
[{old: depth_camera, new: /camera_rgb_optical_frame},{old: thermal_camera, new: /camera_optris_frame}]
</rosparam>
</node>
<node pkg="rosbag" type="play" name="player" args="--clock $(arg bag_dir)/$(arg file)">
<remap from="tf" to="tf_old" />
</node>需要注意,当需要重映射 nodelet 内部发布的 tf 话题时,需要在 nodelet 的 manager 节点启动时添加 remap 参数。
#!/usr/bin/env python
# Software License Agreement (BSD License)
#
# Copyright (c) 2008, Willow Garage, Inc.
# All rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions
# are met:
#
# * Redistributions of source code must retain the above copyright
# notice, this list of conditions and the following disclaimer.
# * Redistributions in binary form must reproduce the above
# copyright notice, this list of conditions and the following
# disclaimer in the documentation and/or other materials provided
# with the distribution.
# * Neither the name of Willow Garage, Inc. nor the names of its
# contributors may be used to endorse or promote products derived
# from this software without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
# FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
# COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
# INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
# BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
# LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
# CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
# LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
# ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
# POSSIBILITY OF SUCH DAMAGE.
#
## remap a tf topic
from __future__ import print_function
import rospy
from tf.msg import tfMessage
class TfRemapper:
def __init__(self):
self.pub = rospy.Publisher('/tf', tfMessage, queue_size=1)
mappings = rospy.get_param('~mappings', [])
self.mappings = {}
for i in mappings:
if "old" in i and "new" in i:
self.mappings[i["old"]] = i["new"]
print("Applying the following mappings to incoming tf frame ids", self.mappings)
rospy.Subscriber("/tf_old", tfMessage, self.callback)
def callback(self, tf_msg):
for transform in tf_msg.transforms:
if transform.header.frame_id in self.mappings:
transform.header.frame_id = self.mappings[transform.header.frame_id]
if transform.child_frame_id in self.mappings:
transform.child_frame_id = self.mappings[transform.child_frame_id]
self.pub.publish(tf_msg)
def remap_tf():
pub.publish(Empty())
if __name__ == '__main__':
rospy.init_node('tf_remapper')
tfr = TfRemapper()
rospy.spin()References
案例
log4j.logger.ros.log_test=INFO,rosout_a # log_test是package名
log4j.appender.rosout_a=org.apache.log4j.RollingFileAppender # 输出到文件,超过大小后自动创建下一个
log4j.appender.rosout_a.Threshold=INFO # 最低级别是INFO
log4j.appender.rosout_a.Append=true # 追加模式
log4j.appender.rosout_a.MaxFileSize=100KB # 每个日志文件的大小
log4j.appender.rosout_a.MaxBackupIndex=10 # 最多产生多少日志文件,默认2个
log4j.appender.rosout_a.File=/home/hlhp/output.txt # 输出文件,可结合环境变量${ROSOUT_LOG_PATH}
log4j.appender.rosout_a.layout=org.apache.log4j.PatternLayout # 常用PatternLayout
log4j.appender.rosout_a.layout.ConversionPattern = %-d{yyyy-MM-dd HH:mm:ss SSS} %m%n # 输出格式
References
PointCloud<PointXYZ> cloud_xyz;
// [...]
PointCloud<PointXYZRGB> cloud_xyzrgb;
copyPointCloud(cloud_xyz, cloud_xyzrgb);How to convert between different point cloud types using PCL?
依赖库
Note: Use otool -L libfile on macOS.
What does if name == "main": do?
tf 可能会导致程序异常
<node pkg="tf" type="static_transform_publisher" name="t265_to_d400" args="-0.009375589 0.015890727 0.028273059 0 0 0 /$(arg tf_prefix_camera1)_link /$(arg tf_prefix_camera2)_link 100"/>建议使用 tf2_ros
<node pkg="tf2_ros" type="static_transform_publisher" name="t265_to_d400" args="-0.009375589 0.015890727 0.028273059 0 0 0 /$(arg tf_prefix_camera1)_link /$(arg tf_prefix_camera2)_link"/>- 用GitHub或类似的现代平台
- 平台上设置禁止直接push到主干,所有的修改必须fork后走Pull Request
- 启用CI(持续集成),提PR时平台自动执行CI步骤,失败的不能被合并(不准开任何后⻔)
- CI加入linter,确保代码规范;所有代码规范必须要可由linter检测,代码规范/linter配置规则也要针对实践中发现的问题不断补充细化和更新
- CI加入单元测试,代码的测试覆盖率至少60%以上,核心模块测试覆盖率必须90%以上;所有发现的bug必须由造成bug的人负责补上单元测试
- 每个PR强制要求改动代码行数小于100行,新人要求小于60行,以利code review
- 每个PR在CI通过后必须有其他人进行过code review并approve,否则不能被merge,新人的代码必须至少有两人review和approve(比如新人的mentor和相关代码文件或目录的owner)
- 针对每个PR自动部署一份到测试环境,方便自测或提供给测试团队进行必要的测试
- 每2周检查近期bug,总结经验教训,特别是重复犯的错误一定要建立机制去防范
- 重视现代编译器(gcc/g++ 10)输出的提示或警告内容,编译器能检查出一些简单的错误。有次花了3天时间才找到的BUG,其实编译器早早提示了需要
return *this; - 用 GDB/Valgrind 排查
- FOC 驱动器 vs 无刷电调
无刷直流电机(BLDC)vs 永磁同步电机(PMSM)
- In simple terms, a BLDC motor has trapezoidal back-emf, whereas a PMSM has sinusoidal back-emf.
- A BLDC motor works well with stepped input DC voltage, whereas a PMSM works well with purely sinusoidal voltage
- PMSM has reduced torque ripple and current-ripple than BLDC motors.
- BLDC motors have concentric windings whereas PMSM has distributed winding.
- PMSMs are expensive, and highly efficienct. Suitable for high-power and high-efficiency applications.
- BLDC motors are cost-effective. Suitable for low-power and low-cost applications.
- Harmonic content is very high the stator current of BLDC motor due to its quazi-rectangular shape, whereas the stator current distortion in a PMSM is very less as it has a sinusoidal shape.
BLDC 反电动势接近梯形波,所以依然是采用方波驱动;PMSM 反电动势被设计为正弦波(利用 SVPWM)
- Things in Motion
- FOC算法的简要介绍
- SimpleFOClibrary
- How to estimate the torque of a BLDC (PMSM) electric motor using only its Kv and current draw
- Field Oriented Control of Permanent Magnet Motors
- Everything You Ever Wanted to Know About Brushless Motors
- EIGEN_MAKE_ALIGNED_OPERATOR_NEW
-march=native- SSE/AVX
- 从Eigen向量化谈内存对齐
- Structures Having Eigen Members
A Comprehensive List of 3D Sensors
Qt的signal/slot是为了解决对象间通信问题,同时避免共享指针造成的内存野指针和对象生命周期问题
Window::Window()
{
QPushButton *b = new QPushButton(this);
connect(b, SIGNAL(clicked()), SLOT(on_button_clicked()));
}
Window::on_button_clicked()
{
QPushButton *b = qobject_cast<QPushButton*>(sender());
b->setText("clicked!");
}... launch-prefix="xterm -e gdb --args" ...
... launch-prefix="gdb -ex run --args" ...代码优化指南
V. Hunter Adams, Lecturer of Electrical Engineering, Cornell University
- Estimation: Introduction by Example
- How Kalman Filters Work
- Attitude Dynamics and Determination
- NASA Mission Design Process
Building and using catkin packages in a workspace
cd ~/catkin_ws
catkin_make install修改 CMakeLists.txt 文件,添加
set(CPACK_PACKAGE_NAME "example")
set(CPACK_SET_DESTDIR ON)
set(CPACK_INSTALL_PREFIX "/home/vesoft/install")
set(CPACK_PACKAGE_VERSION "1.0.0")
set(CPACK_RPM_PACKAGE_GROUP "vesoft")
set(CPACK_PACKAGE_VENDOR "vesoft")
set(CPACK_RPM_PACKAGE_LICENSE "Apache 2.0 + Common Clause 1.0")
include(CPack)注
cat install_manifest.txt | xargs echo sudo rm | shstatic_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms
static_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_ms
#include <signal.h>
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
void my_handler(int s){
printf("Caught signal %d\n",s);
exit(1);
}
int main(int argc,char** argv)
{
struct sigaction sigIntHandler;
sigIntHandler.sa_handler = my_handler;
sigemptyset(&sigIntHandler.sa_mask);
sigIntHandler.sa_flags = 0;
sigaction(SIGINT, &sigIntHandler, NULL);
pause();
return 0;
}TODO
void eigen2cv(const Eigen::Matrix<_Tp, _rows, _cols, _options, _maxRows, _maxCols>& src, Mat& dst)
void cv2eigen(const Mat& src, Eigen::Matrix<_Tp, _rows, _cols, _options, _maxRows, _maxCols>& dst)- Gazebo Plugin: Robosense Simulator
- Gazebo Plugin: RealSense
- Elevation Mapping cupy
- Video Game Physics Tutorial - Part I: An Introduction to Rigid Body Dynamics
- Video Game Physics Tutorial - Part II: Collision Detection for Solid Objects
- Video Game Physics Tutorial - Part III: Constrained Rigid Body Simulation
- Algorithmica
- hacking C++
- Code Review
- A GPU-accelerated TSDF and ESDF library for robots equipped with RGB-D cameras
- SIGGRAPH'21 Course: Contact and Friction Simulation for Computer Graphics
- Ten Minute Physics
- CMPT 466/766: Computer Animation
- OpenRAVE
- Writing the first draft of your science paper — some dos and don’ts
- MEE5114 Advanced Control for Robotics
- Create® 3 Docs
- JoltPhysics
- Unicode Search
ReadMe (export from Safari 20220505)
Solutions : Rethink Robotics https://support.rethinkrobotics.com/support/solutions
Differential Equations, Mechanics, and Computation https://ode-math.com/
ros-drivers/video_stream_opencv: A package to open video streams and publish them in ROS using the opencv videocapture mechanism https://github.com/ros-drivers/video_stream_opencv
camera_calibration - ROS Wiki https://wiki.ros.org/camera_calibration
ldconfig(8) - Linux man page https://linux.die.net/man/8/ldconfig
bernhardpg/collision-free-mixed-integer-planning-for-uavs: Collision-Free Mixed-Integer Planning for Quadrotors Using Convex Safe Regions https://github.com/bernhardpg/collision-free-mixed-integer-planning-for-uavs
python - how does cv2.VideoCapture() changes capture resolution? - Stack Overflow https://stackoverflow.com/questions/14011428/how-does-cv2-videocapture-changes-capture-resolution
OpenCV: Video I/O with OpenCV Overview https://docs.opencv.org/4.5.5/d0/da7/videoio_overview.html
dottantgal/ROS2_learning: A useful collection of CPP examples to learn ROS2 from zero https://github.com/dottantgal/ROS2_learning
Tutorial · jbeder/yaml-cpp Wiki https://github.com/jbeder/yaml-cpp/wiki/Tutorial
Drake Concepts - Drake Tutorial https://drake.guzhaoyuan.com/introduction/drake-concept
https://arxiv.org/pdf/1909.05700.pdf https://arxiv.org/pdf/1909.05700.pdf
sebastianstarke/AI4Animation: Bringing Characters to Life with Computer Brains in Unity https://github.com/sebastianstarke/AI4Animation
Humanoid Robot Animation | Udemy https://www.udemy.com/course/humanoid-robot-animation/
medalotte/sampling-based-planners: C++ implementation of RRT, RRT*, and Informed-RRT* using kd-tree for searching NN and NBHD nodes. Supports arbitrary dimensions and compiles as a shared library. https://github.com/medalotte/sampling-based-planners
ntnu-arl/gbplanner_ros: Graph-based Exploration Planner for Subterranean Environments https://github.com/ntnu-arl/gbplanner_ros
static members - cppreference.com https://en.cppreference.com/w/cpp/language/static
David-Haim/concurrencpp: Modern concurrency for C++. Tasks, executors, timers and C++20 coroutines to rule them all https://github.com/David-Haim/concurrencpp
MLNLP-World/Paper-Writing-Tips: Paper Writing Tips https://github.com/MLNLP-World/Paper-Writing-Tips
Visualizing quaternions, an explorable video series https://eater.net/quaternions
geekan/HowToLiveLonger: 程序员延寿指南 | A programmer's guide to live longer https://github.com/geekan/HowToLiveLonger
miloyip/json-tutorial: 从零开始的 JSON 库教程 https://github.com/miloyip/json-tutorial
InteractiveComputerGraphics/PositionBasedDynamics: PositionBasedDynamics is a library for the physically-based simulation of rigid bodies, deformable solids and fluids. https://github.com/InteractiveComputerGraphics/PositionBasedDynamics
CppCon 2018: Bjarne Stroustrup “Concepts: The Future of Generic Programming (the future is here)” - YouTube https://www.youtube.com/watch?v=HddFGPTAmtU
CppCon 2018: Michael Gopshtein “CUDA Kernels with C++” - YouTube https://www.youtube.com/watch?v=HIJTRrm9nzY
Drake: MultibodyPlant< T > Class Template Reference https://drake.mit.edu/doxygen_cxx/classdrake_1_1multibody_1_1_multibody_plant.html#a029b22a36d5c6ee85247b9c1cfe84c6b
parallel101/course: 高性能并行编程与优化 - 课件 https://github.com/parallel101/course
相关问题 · Issue #1 · ShuoYangRobotics/A1-QP-MPC-Controller https://github.com/ShuoYangRobotics/A1-QP-MPC-Controller
Dual quaternion - Wikipedia https://en.wikipedia.org/wiki/Dual_quaternion
udev - Assign webcam to a specific /dev/video# - Ask Ubuntu https://askubuntu.com/questions/715333/assign-webcam-to-a-specific-dev-video
MatthewPeterKelly/OptimTraj: A trajectory optimization library for Matlab https://github.com/MatthewPeterKelly/OptimTraj
How to Write a Git Commit Message https://cbea.ms/git-commit/
pdn odn on Behance https://www.behance.net/12f6
hengli/camodocal: CamOdoCal: Automatic Intrinsic and Extrinsic Calibration of a Rig with Multiple Generic Cameras and Odometry https://github.com/hengli/camodocal
narutojxl/direct_lidar_odometry_noted https://github.com/narutojxl/direct_lidar_odometry_noted
Quake Source Code Review https://fabiensanglard.net/quakeSource/
Drake: MathematicalProgram Class Reference https://drake.mit.edu/doxygen_cxx/classdrake_1_1solvers_1_1_mathematical_program.html
Ch. 22 - Multi-Body Dynamics http://underactuated.mit.edu/multibody.html#section1
C++语言的单元测试与代码覆盖率 https://paul.pub/gtest-and-coverage/
#!/bin/sh
QTVERSION=5
FILES="$(find . -name '*.cpp' -o -name '*.qrc' -o -name '*.ui' | sed -e 's,\.\/, ,')"
if [ -z "$FILES" ]; then
echo "No cpp files found in the current directory"
exit 1
fi
PROJECTNAME=$(basename "$PWD" | sed -e 's/ /_/g')
TARGET="$PROJECTNAME"
if [ "$QTVERSION" != "none" ]; then
QT=Qt$QTVERSION
QTLIBS="Core Gui"
QTTARGETS="$QT::Core $QT::Gui"
if [ -n "$(grep QApplication *.cpp)" ]; then
QTLIBS="$QTLIBS Widgets"
QTTARGETS="$QTTARGETS $QT::Widgets"
AUTOUIC="set(CMAKE_AUTOUIC TRUE)"
fi
fi
cat >CMakeLists.txt <<EOF
cmake_minimum_required(VERSION 3.9)
project($PROJECTNAME)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_INCLUDE_CURRENT_DIR ON)
EOF
if [ "$QTVERSION" != "none" ]; then
cat >>CMakeLists.txt <<EOF
find_package($QT CONFIG REQUIRED COMPONENTS $QTLIBS)
set(CMAKE_AUTOMOC TRUE)
set(CMAKE_AUTORCC TRUE)
$AUTOUIC
EOF
fi
cat >>CMakeLists.txt <<EOF
add_executable($PROJECTNAME
$FILES
)
EOF
if [ "$QTVERSION" != "none" ]; then
cat >>CMakeLists.txt <<EOF
target_link_libraries($PROJECTNAME $QTTARGETS)
EOF
fiReference: https://github.com/KDAB/KDToolBox/tree/master/qt/cmake-project
- 成功率
- 距离终点的距离
- 计算时间
- 与最短路径的偏差
- 路径长度
- 搜索空间
- 最大内存占用
- 距离障碍物的平均距离
- 轨迹平滑程度
定位算法评价指标
- absolute pose error
- relative pose error
References
- PathBench
- Python package for the evaluation of odometry and SLAM
- Metrics for System Assessment | Autonomous Navigation, Part 6
cmake_minimum_required(VERSION 3.14)
project(my_project)
# GoogleTest requires at least C++11
set(CMAKE_CXX_STANDARD 11)
include(FetchContent)
FetchContent_Declare(
googletest
URL https://github.com/google/googletest/archive/609281088cfefc76f9d0ce82e1ff6c30cc3591e5.zip
)
# For Windows: Prevent overriding the parent project's compiler/linker settings
set(gtest_force_shared_crt ON CACHE BOOL "" FORCE)
FetchContent_MakeAvailable(googletest)Ref:
Dual Numbers a+bϵ (s.t. ϵ^2=0)
Ref:
- A Hands-on Introduction to Automatic Differentiation P1 (forward mode)
- A Hands-on Introduction to Automatic Differentiation P2 (reverse mode)
- Hands-on-Intro-to-Auto-Diff
- Autodiff Workshop
- YouTube: Automatic Differentiation: History and Headroom
- YouTube: Autodiff generates your exponential family inference code

sudo xargs rm < install_manifest.txtln -s /usr/local/include/opencv4/opencv2/ /usr/local/include/opencv2find DIRECTORY -iname '*.h' -o -iname '*.hh' -o -iname '*.hpp' -o -iname '*.c' -o -iname '*.cc' -o -iname '*.cpp' | xargs clang-format -style=google -iRef: Provide custom gradient to drake::MathematicalProgram
from pydrake.all import AutoDiffXd, MathematicalProgram, Solve
prog = MathematicalProgram()
x = prog.NewContinuousVariables(1, 'x')
def cost(x):
return (x[0]-1.)*(x[0]-1.)
def constraint(x):
if isinstance(x[0], AutoDiffXd):
y = AutoDiffXd(2*x[0].value(), 2*x[0].derivatives())
return [y]
return 2*x
cost_binding = prog.AddCost(cost, vars=x)
constraint_binding = prog.AddConstraint(
constraint, lb=[0.], ub=[2.], vars=x)
result = Solve(prog)Ref:
- A Visual Intro to NumPy
- Advanced NumPy: Master stride tricks with 25 illustrated exercises
- NumPy internals
- Understanding the internals of NumPy to avoid unnecessary array copying
- NumPy Illustrated: The Visual Guide to NumPy
- A Comprehensive Guide to NumPy Data Types
- Advanced NumPy
- Scipy Lecture Notes
- An Illustrated Guide to Shape and Strides
- Nature: Array programming with NumPy
brew install djvu2pdf
djvu2pdf INPUT.djvu OUTPUT.pdfOrchestration vs. Choreography
force1+force2=net;
(force1+force2).operator=(net);例子
#include <string>
struct A {
int n;
std::string s1;
A() = default;
A(A const&) = default;
A& operator=(const A& p) = delete;
};
int main() {
A a;
A() = a; // error: overload resolution selected deleted operator '='
}https://www.youtube.com/watch?v=cZs6HQdbzX4
What’s the difference between contouring and point-to-point motion?
反电动势波形为方波的永磁同步电机称为永磁无刷直流电机
函数其实只是没有挂起点的协程
$ sudo systemctl --all list-unit-files --type=service
# OR
$ ls /lib/systemd/system/*.service /etc/systemd/system/*.serviceRef: Command to list services that start on startup?
$ cd /etc/pam.d
$ sudo vim ./sudo
# Add the following below the first line
auth sufficient pam_tid.soRef: Quick Tip: Enable Touch ID for sudo
Solution
$ defaults write org.python.python ApplePersistenceIgnoreState NO
# Reset
# defaults write org.python.python ApplePersistenceIgnoreState YES- ROS Decentralization Feature
- High Efficient Communication based on Shared Memory Transport Feature
- Native Support with Protobuf Feature
Cite: https://github.com/ApolloAuto/apollo-platform/blob/master/ros/docs/design
The multimaster_fkie solution only supports topics and services, however actions are implicitly supported because they are build on top of 5 topics.
Personally I managed to have ttyUSB appear through
$raspi-config. You just have to go toInterfaces Settingsand say you want the serial port activated. Finally,$sudo reboot.
Cite: https://raspberrypi.stackexchange.com/questions/91181/serial-to-usb-no-ttyusb0
sudo tar -xvzf drake-20220114-mac.tar.gz -C /optIssues
ld64.lld: error: unknown argument '--gc-sections'
Solution
<!-- Change -->
-Wl,--gc-sections
<!-- to -->
-Wl,-dead_strip$ openssl dgst -sha256 <file>
# or
$ shasum -a 256 <file>\documentclass{ctexart}
\begin{document}
\tableofcontents
\begin{abstract}
这是简介及摘要。
\end{abstract}
\section{前言}
\section{关于数学部分}
数学、中英文皆可以混排。You can intersperse math, Chinese and English (Latin script) without adding extra environments.
這是繁體中文。
\end{document}# Server
$ iperf -s
# Client
$ iperf -c SERVER_IPhttps://www.bostondynamics.com/resources/webinar/API-tech-talk
Layerd API
- Base
- gRPC
- SDK
- Movement
- State
- Commands
- Autonomy
- GraphNav
- Missions(BT)
- Data
- Data Acquisition
- Network Compute Bridge
- Download sources codes: https://link.zhihu.com/?target=http%3A//ftp.gnu.org/gnu/gcc/gcc-9.1.0/gcc-9.1.0.tar.gz
- Unzip and
$ cd gcc-9.1.0 - Download deps:
$ ./contrib/download_prerequisites $ mkdir build;cd build;../configure -enable-checking=release -enable-languages=c,c++ -disable-multilib$ make && make install
sudo apt update
sudo apt upgrade- Origin: left-down corner
- X_axis: right→
- Y_axis: up↑
Ref: GridMap(ETH)
convert 1.png 2.png 3.png -append 123.pngzip -e name.zip raw_fileIn computer graphics, building your own wheel can often be unevitable. But what fears most is that sometimes you don't even have recipe for the wheel you want to build. There are lots of great paper describing their methods, but many of the implementation details are left out or scattered across the internet.
CollideSDF(); // Collide particles with Signed Distance Fields (Q1)
for (int substep = 0; substep < numSubsteps; substep++) // Reference: [Small steps in physics simulation, 2019]
{
PredictPositions(); // Predict particle positions
FindNeighborsBySpatialHash(); // Use spatial hashing to find particle neighbors
// Handle Collisions
CollideParticles(); // Collide particles with neighboring particles
CollideSDF(); // Collide particles with Signed Distance Fields
// Solve constraints
for (int iteration = 0; iteration < numIterations; iteration++)
{
SolveStretch(); // Stretch constraint keeps the distance between two particles
SolveAttachment(); // Attachment constraint keeps the distance between a particle and a 3D position
// SolveBending(); // Bending constraints doesn't work well on GPU (Q2)
ApplyDeltas(); // Apply position deltas accumulated in previous constraint solving (Q3)
}
Finalize(); // Update velocities and positions
}
ComputeNormals(); // Compute vertex normals for renderingcloc file_or_directorySetting
---
geometry: margin=2cm
output: pdf_document
CJKmainfont: MiSans
colorlinks: true
linkcolor: blue
urlcolor: red
toccolor: gray
title: 机器人感知规划相关资料
author: matheecs
---Usages
pandoc SLAM_Perceptioin_Planning.md -o SLAM_Perceptioin_Planning.pdf --pdf-engine=xelatexError at "user-guide-cn.tex" (line 901, column 1):
unexpected \end
\end{document}
^
分段排查错误发现原因是多了一个 { 大括号
sudo gedit /etc/systemd/logind.confUncomment the line
#HandleLidSwitch=suspend
Change the value to:
HandleLidSwitch=ignore
restart service
systemctl restart systemd-logind.serviceRef: How to Change Lid Close Action in Ubuntu 18.04 LTS
dot -Tpdf art_planner.dot -o art_planner.pdfsudo apt install tldr
tldr -udeb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ jammy-security main restricted universe multiverse
export DISPLAY=:0
ssh -Y remote_host
xeditSolution
find_package(OMPL REQUIRED)
add_executable(ompl_test ompl_test.cc)
target_include_directories(ompl_test PRIVATE ${OMPL_INCLUDE_DIRS})
target_link_directories(ompl_test PRIVATE ${OMPL_LIBRARY_DIRS})
target_link_libraries(ompl_test PRIVATE ${OMPL_LIBRARIES})Ref: Fix linking issues for ODE on macOS
Ref : What are the differences between the different TransportHints?
brew install ccache
export PATH=/opt/homebrew/opt/ccache/libexec:$PATHRef: Ccache
sudo -E rosdep initsudo rosdep init
rosdep update改为执行
# 手动模拟 rosdep init
sudo mkdir -p /etc/ros/rosdep/sources.list.d/
sudo curl -o /etc/ros/rosdep/sources.list.d/20-default.list https://mirrors.tuna.tsinghua.edu.cn/github-raw/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
# 为 rosdep update 换源
export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml
rosdep update
# 每次 rosdep update 之前,均需要增加该环境变量
# 为了持久化该设定,可以将其写入 .bashrc 中,例如
echo 'export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml' >> ~/.bashrcRef: rosdistro 镜像使用帮助
sudo apt-get install wavemon
wavemon
# or
iwconfiggit diff --patch > mypatch.patch
git apply mypatch.patchCite: rqt_launchtree

Cite: Infographics: Operation Costs in CPU Clock Cycles
set(QT5_ROOT_PATH CACHE PATH "Qt5 root directory (i.e. where the 'bin' folder lies)")
if (QT5_ROOT_PATH)
list(APPEND CMAKE_PREFIX_PATH ${QT5_ROOT_PATH})
endif ()Cite: CMake: Finding Qt 5 the “Right Way”
for f in *.HEIC; do heif-convert -q 100 $f $f.jpg; doneOptional
# install imagemagick
brew install imagemagick
# convert a single image
magick convert foo.HEIC foo.jpg
# bulk convert multiple images
magick mogrify -monitor -format jpg *.HEICCite: How to convert a HEIF/HEIC image to JPEG in macOS?
主成分可以在科学的各个领域找到。例如,有一个与物理学相类似的例子。如果把三维数据点看作是一个刚体的质量点,那么特征值对应于惯性的主矩,主成分对应于身体的主轴。
Ref:
brew install viubrew install the_silver_searcherxattr -c /Applications/STM32CubeIDE.app/* multicast time-to-live = 0 or 1 */
lcm::LCM lcm("udpm://239.255.76.67:7667?ttl=1");LCM =
- Type Specification
- Marshalling = Serialization (encode/decode)
- Communication = UDP Multicast
- Tools = lcm-spy
- Note: Unplug the extra network cable (拔掉多余的网线)
Cite: UDP Multicast Setup
<mmintrin.h> MMX
<xmmintrin.h> SSE
<emmintrin.h> SSE2
<pmmintrin.h> SSE3
<tmmintrin.h> SSSE3
<smmintrin.h> SSE4.1
<nmmintrin.h> SSE4.2
<ammintrin.h> SSE4A
<wmmintrin.h> AES
<immintrin.h> AVX, AVX2, FMA
while :; do ./send-message; sleep 1; doneset(Python3_FIND_FRAMEWORK NEVER)Use
target_include_directoriesCite 彭于斌

Cite Mac OS X Internals
for file in *.STL
do
meshlabserver -i $file -o ${file%.*}.obj -m vn
doneset(CMAKE_EXPORT_COMPILE_COMMANDS ON)ffmpeg -ss 30 -t 3 -i input.mkv -vf "fps=10,scale=640:-1:flags=lanczos,split[s0][s1];[s0]palettegen[p];[s1][p]paletteuse" -loop 0 output.gif
# or
ffmpeg -ss 00:01:00 -to 00:02:00 -i input.mp4 -c copy output.mp4man sudo
sudo -E todoooooooooIf you are creating a shared library and your source cpp files #include the headers of another library (Say, QtNetwork for example), but your header files don't include QtNetwork headers, then QtNetwork is a PRIVATE dependency.
If your source files and your headers include the headers of another library, then it is a PUBLIC dependency.
If your header files other than your source files include the headers of another library, then it is an INTERFACE dependency.
Cite:
- https://stackoverflow.com/questions/26037954/cmake-target-link-libraries-interface-dependencies
- cmake-buildsystem
- CMake target_include_directories meaning of scope
- CMake: Public VS Private VS Interface
- Modern CMake is like inheritance
Template instantiation of templated class constructor
ffmpeg -i nmpc_wbc_with_raibert.mp4 -vf "subtitles=sub.srt:force_style='Fontsize=24'" -c:a copy mysubtitledmovie.mp4inkscape -D image.svg -o image.pdf --export-latexOCR for PDF files using OCRmyPDF
brew install ocrmypdf
ocrmypdf -l eng --deskew --jobs 4 --force-ocr input.pdf output.pdfcmake -Bbuild -GNinja -DCMAKE_BUILD_TYPE=Release -DCMAKE_EXPORT_COMPILE_COMMANDS=ON -DCMAKE_COLOR_DIAGNOSTICS=ONcatkin_make -DCMAKE_BUILD_TYPE=Release -DCMAKE_EXPORT_COMPILE_COMMANDS=YesCite: catkin/catkin_tools#551
Or
catkin build -DCMAKE_EXPORT_COMPILE_COMMANDS=1with follow scripts
#!/bin/sh
cd `catkin locate --workspace $(pwd)`
concatenated="build/compile_commands.json"
echo "[" > $concatenated
first=1
for d in build/*
do
f="$d/compile_commands.json"
if test -f "$f"; then
if [ $first -eq 0 ]; then
echo "," >> $concatenated
fi
cat $f | sed '1d;$d' >> $concatenated
fi
first=0
done
echo "]" >> $concatenated#!/bin/sh
for i in `find . -name '*.STL'`; do
meshlabserver -i $i -o `pwd`/$(echo `basename $i` | sed 's|.STL$|.obj|')
donebug
fatal error: qualified reference to 'MultidimensionalPenalty' is a constructor name rather than a type
template <>
MultidimensionalPenalty::MultidimensionalPenalty<augmented::AugmentedPenaltyBase>(
std::vector<std::unique_ptr<augmented::AugmentedPenaltyBase>> penaltyPtrArray)
: penaltyPtrArray_(std::move(penaltyPtrArray)) {
if (penaltyPtrArray_.empty()) {
throw std::runtime_error("[MultidimensionalPenalty::MultidimensionalPenalty] The penalty array cannot be empty!");
}
}fix
template <>
MultidimensionalPenalty::MultidimensionalPenalty(
std::vector<std::unique_ptr<augmented::AugmentedPenaltyBase>> penaltyPtrArray)
: penaltyPtrArray_(std::move(penaltyPtrArray)) {
if (penaltyPtrArray_.empty()) {
throw std::runtime_error("[MultidimensionalPenalty::MultidimensionalPenalty] The penalty array cannot be empty!");
}
}
There are some CAD and CAE applications such as SolidWorks, Unigraphics NX/Siemens NX and MSC Adams that use an alternate convention for the products of inertia. According to this convention, the minus sign is removed from the product of inertia formulas and instead inserted in the inertia matrix.
cite: https://en.wikipedia.org/wiki/Moment_of_inertia
- Type
chrome://flagsin the address bar; - Type “dark mode” in the search bar;
- Select Enabled for Force Dark Mode for Web Contents.
Cite: How to Enable Dark Mode in Chrome on Ubuntu
Solution: use pip to uninstall PyQt5 and PyQt5-sip
error: return type ...::RCmpEQReturnType of selected 'operator==' function for rewritten '!=' comparison is not 'bool'Solution: use C++17
# pip install pylint
pyreverse -o png <path_to_src>Cite: How to Generate UML Diagrams from Python Source Code?
rosrun mouse_teleop mouse_teleop.py /mouse_vel:=/cmd_velCite: https://www.ubuntukylin.com/applications/106-cn.html
old: Google Input Tools
new: sudo apt-get install ibus-pinyin; Settings -> Input Sources -> Chinese(Intelligent Pinyin)
sudo ln -s /usr/include/eigen3/Eigen /usr/include/EigenAdd file: ~/.docker/config.json
{
"proxies":
{
"default":
{
"httpProxy": "http://192.168.1.12:3128",
"httpsProxy": "http://192.168.1.12:3128",
"noProxy": "*.test.example.com,.example2.com,127.0.0.0/8"
}
}
}Cite: Configure Docker to use a proxy server
docker run --network host -it -v $PWD:"/github/workspace" qsim /bin/bashCite: Networking using the host network
Docker Desktop -> Perferences -> Docker Engine -> Add JSON
{
"registry-mirrors": [
"https://hub-mirror.c.163.com",
"https://mirror.baidubce.com"
]
}sudo apt install gcc-8 g++-8 gcc-9 g++-9 gcc-10 g++-10
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-10 100 --slave /usr/bin/g++ g++ /usr/bin/g++-10 --slave /usr/bin/gcov gcov /usr/bin/gcov-10
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-9 90 --slave /usr/bin/g++ g++ /usr/bin/g++-9 --slave /usr/bin/gcov gcov /usr/bin/gcov-9
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-8 80 --slave /usr/bin/g++ g++ /usr/bin/g++-8 --slave /usr/bin/gcov gcov /usr/bin/gcov-8
sudo update-alternatives --config gcc
export PATH=/usr/lib/ccache:$PATH$ ls -l /usr/lib/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 c++ -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 c89-gcc -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 c99-gcc -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 cc -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 g++ -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 g++-10 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 g++-11 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 g++-8 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 g++-9 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 gcc -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 gcc-10 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 gcc-11 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 gcc-8 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 gcc-9 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-g++ -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-g++-10 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-g++-11 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-g++-8 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-g++-9 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-gcc -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-gcc-10 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-gcc-11 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-gcc-8 -> ../../bin/ccache
lrwxrwxrwx 1 root root 16 3月 20 14:53 x86_64-linux-gnu-gcc-9 -> ../../bin/ccache
$ which gcc
/usr/lib/ccache/gccCite:
sudo add-apt-repository ppa:appimagelauncher-team/stable
sudo apt-get update
sudo apt-get install appimagelauncherfind_package(
Python 3.8
COMPONENTS Interpreter Development.Module
REQUIRED)
# Detect the installed pybind11 package and import it into CMake
execute_process(
COMMAND "${Python_EXECUTABLE}" -m pybind11 --cmakedir
OUTPUT_STRIP_TRAILING_WHITESPACE
OUTPUT_VARIABLE PYBIND11_DIR)
list(APPEND CMAKE_PREFIX_PATH "${PYBIND11_DIR}")
find_package(pybind11 REQUIRED)Cite: Setting up a build system
作者:吴咏炜 链接:https://www.zhihu.com/question/452639015/answer/1814806992 编译器仍然是最“好”的检查工具。使用 GCC/Clang 时,我现在一般会开启
-Werror -Wfatal-errors -Wall -Wextra,可以不费任何力气发现很多的常见错误。使用超过一个编译器。比如,如果你日常使用 GCC 的话,考虑使用 Clang 来编译;反之亦然。一般而言,最常用的三个编译器中,Clang 对 C++ 标准的符合程度最高,但凡事不绝对,多用几个为好。LLVM 项目除了产出了 LLVM 虚拟机和 Clang 编译器,还有一大堆小工具可以用。我日常用 Clang-Format 来格式化代码,用 Clang-Tidy 来检查代码的合规性。注意这两个工具就不是随便用几个命令行选项了,而是应该使用配置文件来进行配置。Clang-Tidy 的选项还是相当复杂的,从代码风格的现代化,可读性,常见错误,是否满足《C++ 核心指南》里的条款,到是否满足某些特定行业的编码规范,虽然不是应有尽有,也是相当丰富了。哦,对了,作为 Clang 生态的额外奖励,如果你的编辑环境使用 Clangd 作为语言支持(如 Visual Studio Code 和 Vim 都支持),你在添加了 Clang-Tidy 配置文件之后,可以直接在编辑环境看到问题的加亮。这绝对是效率利器。
fwupdmgr refresh
fwupdmgr get-updates
fwupdmgr update#include "spdlog/fmt/ostr.h" Cite: gabime/spdlog#1638
pdfunite *.pdf out.pdfexport HOMEBREW_BREW_GIT_REMOTE="https://mirrors.ustc.edu.cn/brew.git"
export HOMEBREW_CORE_GIT_REMOTE="https://mirrors.ustc.edu.cn/homebrew-core.git"
export HOMEBREW_BOTTLE_DOMAIN="https://mirrors.ustc.edu.cn/homebrew-bottles"
export HOMEBREW_API_DOMAIN="https://mirrors.ustc.edu.cn/homebrew-bottles/api"Cite: https://mirrors.ustc.edu.cn/help/brew.git.html
Here in this article we’ll bring together research, comments from people who are very familiar with CPUs, and a bit of our in-house data to show why focusing on the ISA is a waste of time(1) and to start us off on our little adventure, let’s reference Anandtech’s interview of Jim Keller, an engineer who worked on several successful CPU designs including AMD’s Zen and Apple’s A4/A5. cite: https://chipsandcheese.com/2021/07/13/arm-or-x86-isa-doesnt-matter
Cite: https://nanoreview.net/en/cpu-compare
MCVE = minimal, complete and verifiable example
cite: https://stackoverflow.com/help/minimal-reproducible-example
torque = damping + motor
https://www.mobilephonemuseum.com/catalogue
sudo apt install mold
# ld.lld: No such file or directory
sudo ln -s /usr/bin/ld.lld-16 /usr/bin/ld.lldCMake support
add_link_options("-fuse-ld=mold")DO NOT use the auto keywords with Eigen's expressions, unless you are 100% sure about what you are doing. In particular, do not use the auto keyword as a replacement for a Matrix<> type.
Cite:
- https://eigen.tuxfamily.org/dox/TopicPitfalls.html
- https://download.tuxfamily.org/eigen/eigen_CGLibs_Giugno_Pisa_2013.pdf
- Aliasing: https://eigen.tuxfamily.org/dox/group__TopicAliasing.html
- myDemo: https://godbolt.org/z/KPM4hvvan
- BIOS (ThinkPad)
- Preferences > Keyboard > Keyboard Shortcuts... > Modifier Keys (MacBook)
python -m cProfile -o demo.prof demo.py
snakeviz demo.prof- ncalls: Total number of calls to the function. If there are two numbers, that means the function recursed and the first is the total number of calls and the second is the number of primitive (non-recursive) calls.
- tottime: Total time spent in the function, not including time spent in calls to sub-functions
- percall: tottime divided by ncalls
- cumtime: Cumulative time spent in this function and all sub-functions
- percall: cumtime divided by ncalls
- filename:lineno(function): File name and line number were the function is defined, and the function’s name
git archive --format=zip --output /full/path/to/zipfile.zip masterUse smart pointers to create and delete your objects. The easiest one to use is unique_ptr.
Cite: how to destroy an object in C++
rsyncis good for incremental transfers and for taking the backup.scpis good while securely pushing or pulling the small file from or to the remote nodes.
- Release:
-O3 -DNDEBUG - Debug:
-O0 -g - RelWithDebInfo:
-O2 -g -DNDEBUG - MinSizeRel:
-Os -DNDEBUG
https://abhinand05.medium.com/run-any-executable-as-systemd-service-in-linux-21298674f66f
Command to list services that start on startup?
sudo systemctl --all list-unit-files --type=servicecite: https://askubuntu.com/questions/218/command-to-list-services-that-start-on-startup
pdftoppm -jpeg input.pdf > out.jpegSolution: Building CasADi from sources
cmake -Bbuild -GNinja -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=$HOME/mylibs -DWITH_IPOPT=ONReferences
- Quaternion MUST normalize!
- Use
revolutejoint type in URDF! (butcontinuous) - JointV of JointModelSphericalZYX is base_orientation_zyx_derivatives
- v2rayA:快速上手-透明代理
- Arch Linux 安装使用教程
- Xfce
- yay
- Swap file
- Hibernation
- NetworkManager
- LightDM
- system-installation-guide.md
sudo apt-get install texlive-full
sudo apt install ttf-mscorefonts-installer
sudo fc-cache -f -v
# sudo apt install --reinstall ttf-mscorefonts-installerbooks:
- Step1: Filters
$\to$ Transform: Flip and/or swap axis - Step2: Filters
$\to$ Invert Faces Orientation
https://www.youtube.com/watch?v=0EUIVnp1V0Q&t=186s
TARGET_LINK_LIBRARIES(exe -lm ${LIBS})libm - C math library
https://askubuntu.com/questions/527665/undefined-reference-to-symbol-expglibc-2-2-5
https://arangodb.com/2021/02/cpp-memory-model-migrating-from-x86-to-arm/
How to use WORHP and MA57
# MA57
export LD_LIBRARY_PATH=/usr/local/lib:$LD_LIBRARY_PATH
sudo ln -s /usr/local/lib/libcoinhsl.so /usr/local/lib/libhsl.so
# WORHP
export LD_LIBRARY_PATH=/home/matheecs/Downloads/worhp_1.15-0_linux/lib:$LD_LIBRARY_PATHcite: https://github.com/coin-or-tools/ThirdParty-HSL
-
类文件夹: 名称以
@字符开头,后跟类名 (当使用多个文件定义一个类时,请使用此类型的文件夹) -
包文件夹: 名称以
+字符开头+mypack +mypack/pkfcn.m % a package function +mypack/@myClass % class folder in a package
引用包中的包成员
z = mypack.pkfcn(x,y);
pip install setuptools==65.5.0 pip==21 # gym 0.21 installation is broken with more recent versions
pip install wheel==0.38.0cite https://stackoverflow.com/a/77205046/14562781
Dependencies:
- Eigen3
- urdfdom_headers(APT) & urdfdom(APT) & console_bridge
- Boost
./bootstrap.sh && sudo ./b2 install - eigenpy
- hpp-fcl (
BUILD_WITH_COLLISION_SUPPORT=ON) - CasADi (
BUILD_WITH_CASADI_SUPPORT=ON)
CasADi (不要用 pip 安装的包,因为 C++ ABI 不兼容):
cmake -Bbuild -GNinja -DCMAKE_BUILD_TYPE=Release -DCMAKE_COLOR_DIAGNOSTICS=ON -DCMAKE_INSTALL_PREFIX=$HOME/mylibs -DWITH_IPOPT=ON -DWITH_OSQP=ON -DWITH_PYTHON3=ON -DWITH_PYTHON=ON
cmake --install buildPin3:
cmake -Bbuild -GNinja -DCMAKE_BUILD_TYPE=Release -DCMAKE_COLOR_DIAGNOSTICS=ON -DCMAKE_INSTALL_PREFIX=$HOME/mylibs -DCMAKE_PREFIX_PATH=$HOME/mylibs -DBUILD_WITH_CASADI_SUPPORT=ON -DBUILD_WITH_COLLISION_SUPPORT=ON -DBUILD_TESTING=OFF
cmake --install buildUse the bundled python with Isaac Sim! (wo conda)
N.B. Use local assets pack but Nucleus
{kind=link}
{kind=link}
{kind=link}
carb_settings_iface.set_string(
"/persistent/isaac/asset_root/default",
"/media/matheecs/BF0F1C9B0BED3510/isaac_sim-assets-2023.1.1/Assets/Isaac/2023.1.1",
)
carb_settings_iface.set_string(
"/persistent/isaac/asset_root/nvidia",
"/media/matheecs/BF0F1C9B0BED3510/isaac_sim-assets-2023.1.1/Assets/Isaac/2023.1.1",
)Run Isaac Sim with the flag below to use the local assets:
./isaac-sim.sh --/persistent/isaac/asset_root/default="/home/<username>/Downloads/isaac_sim-assets-1-2023.1.1/Assets/Isaac/2023.1.1"One of the worst software experience to use. Big framework, Bad experience.
three main workflows when developing in Omniverse Isaac Sim
- GUI
- Extensions
- Standalone Python
$ sudo ntfsfix /dev/sda1
Mounting volume... $MFTMirr does not match $MFT (record 0).
FAILED
Attempting to correct errors...
Processing $MFT and $MFTMirr...
Reading $MFT... OK
Reading $MFTMirr... OK
Comparing $MFTMirr to $MFT... FAILED
Correcting differences in $MFTMirr record 0...OK
Correcting differences in $MFTMirr record 3...OK
Processing of $MFT and $MFTMirr completed successfully.
Setting required flags on partition... OK
Going to empty the journal ($LogFile)... OK
Checking the alternate boot sector... OK
NTFS volume version is 3.1.
NTFS partition /dev/sda1 was processed successfully.mkdir -p ~/miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm -rf ~/miniconda3/miniconda.sh
~/miniconda3/bin/conda init bash
~/miniconda3/bin/conda init zsh
conda config --set auto_activate_base false