Home
This is intended to be a repository for NIRC2 distortion solutions. Please submit and issue or email jessica.lu [at] hawaii.edu with questions.
See Service et al., submitted for details on solution construction.
See Yelda et al. 2010 for details on solution construction.
Note, all files above are zipped FITS files with 1024 x 1024 arrays containing a map of the distortion. Within the distortion maps, each pixel specifies the required shift (in pixels) to undistort a NIRC2 image. Uncertainty maps include both statistical measurement error and residual systematic error, which has a magnitude of 0.1 pix.
Python code to undistort individual frames using the IRAF package drizzle: nirc2dewarp.py (Last updated: 2010 Nov. 20) We thank Shelley Wright for her help with this code.
Also see notes at: AstroBetter
The NIRC2 position angle (PA) is defined as the angle of the NIRC2 y-axis on the sky measured East of North. The true NIRC2 PA = ROTPOSN - INSTANGLE - \beta as illustrated below.
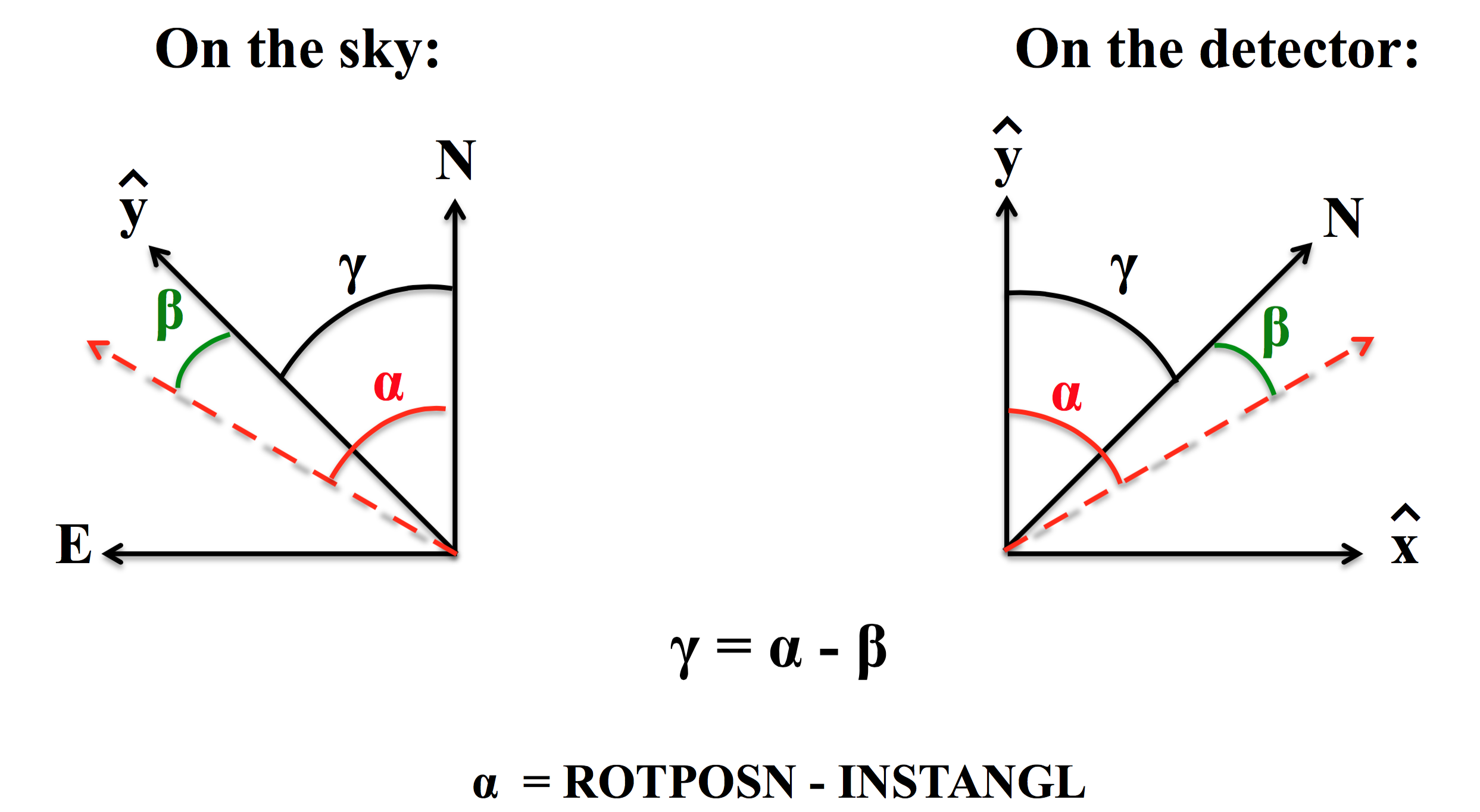 The values of beta are:
The values of beta are:
- 0.252 +/- 0.009 degrees prior to 2015 April 13
- 0.262 +/- 0.020 degrees after 2015 April 13
Here are two examples of how this angle offset should be applied:
Example 1: For ROTPOSN - INSTANGL = 0, rotate your NIRC2 image by 0.252° clockwise to get North up.
Example 2: For a specified PA (ROTPOSN-INSTANGL) of α, rotate your NIRC2 image by α - 0.252° counterclockwise to get North up.
See Yelda et al. 2010 for more details.
- 9.952 +/- 0.002 mas/pixels prior to 2015 April 13
- 9.971 +/- 0.004 +/- 0.001 mas/pixels after 2015 April 13
Please cite Yelda et al. 2010 and Service et al., submitted when using these distortion solutions.
ADD FUNDING AND ACKNOWLEDGEMENTS