简述:关于星星的View,满足你对所有个角的星星的幻想。
项目包括StarView,StarDrawable,PathStarView。
StarView由普通图片绘制而成。
StaDrawable是一个Drawable类。支持任意多个角(Angular)。
PathStarView 支持任意多个角(Angular) 的星星View。
[注] 为支持任意多个角度的星星,经过了一系列复杂的数学运算,这将在文末有说明。
它们的效果如下。

StarView
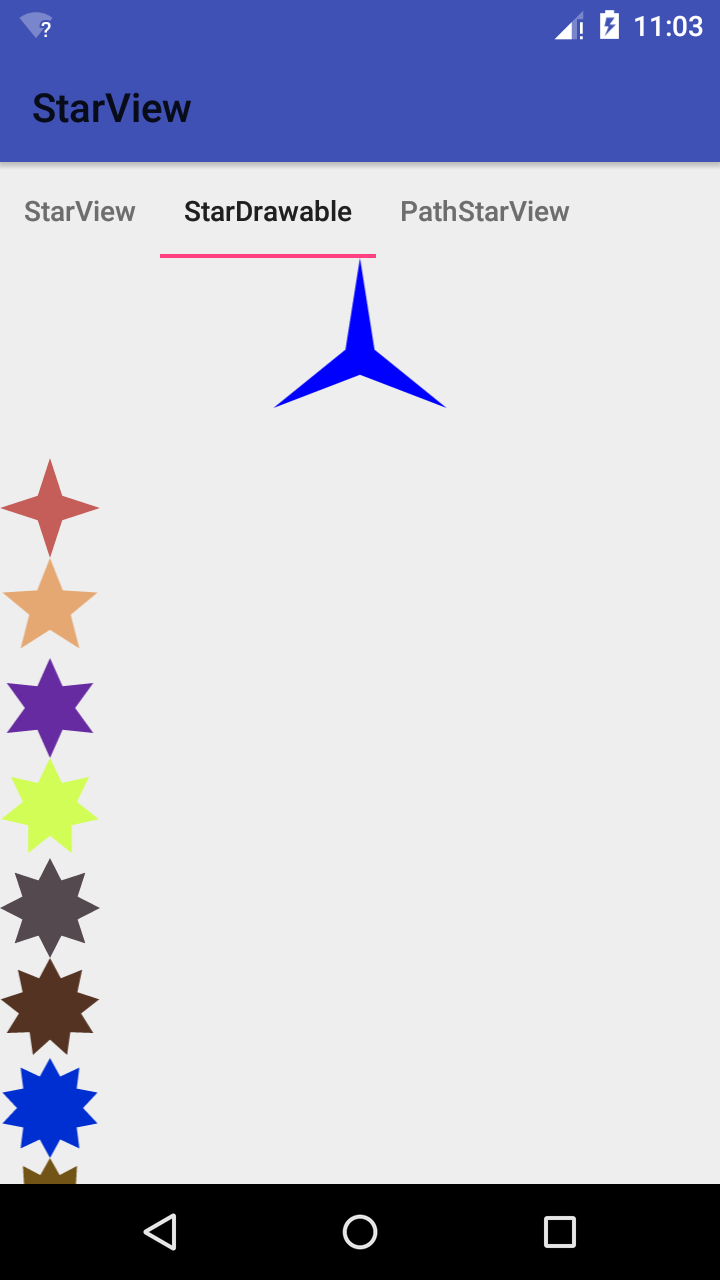
StarDrawable

PathStarView

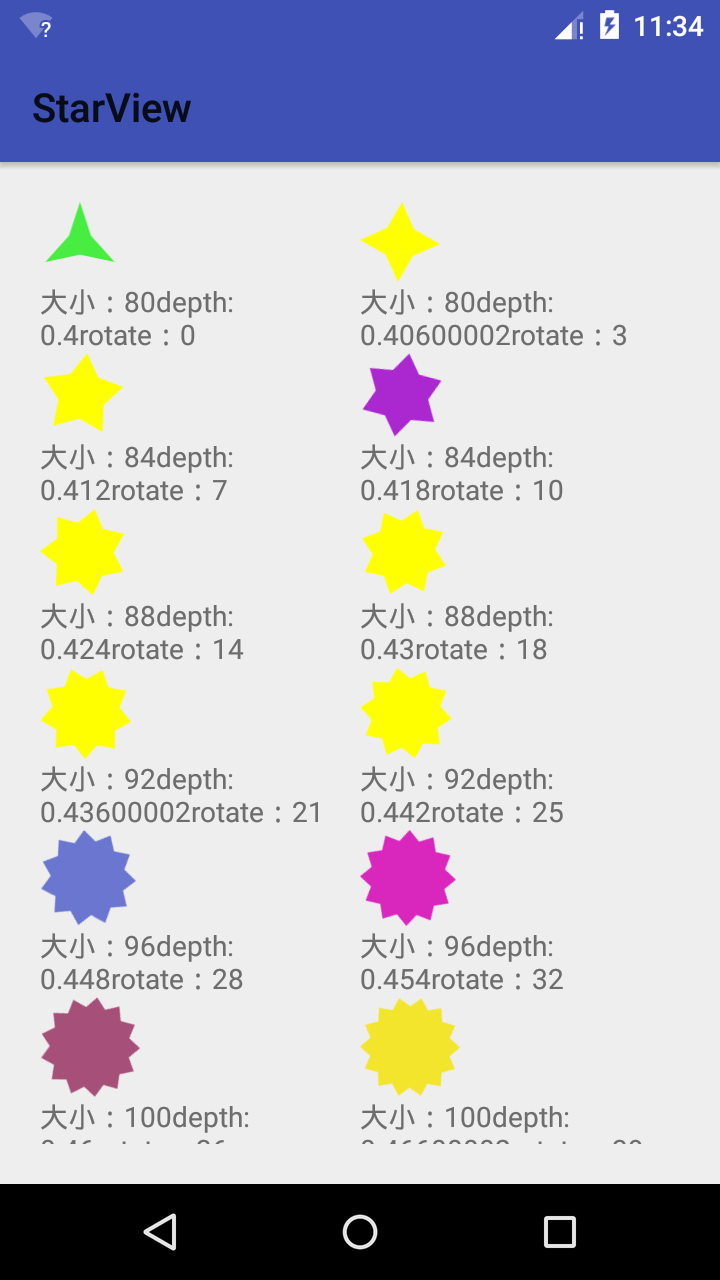
PathStarView -- depth参数

PathStarView -- rotate参数

PathStarView -- size参数

PathStarView -- horm参数
PathStarView -- 综合效果
多角星星在计算时,通过圆内接正多边形减去特定弧度的三角形而成,因此,这样的星星被我称为正多角星。
至于非正多角星。因为可以随手画出,不能归纳为数学函数。因此,不做研究。
涉及最多的是圆的函数公式,衍生的公式(弧的计算,三角函数等),以及勾股定理。
Android的屏幕坐标与常规坐标不同,其Y轴完全相反,在计算上会带来一定的困惑性。 下面是我计算正多角星的图解:
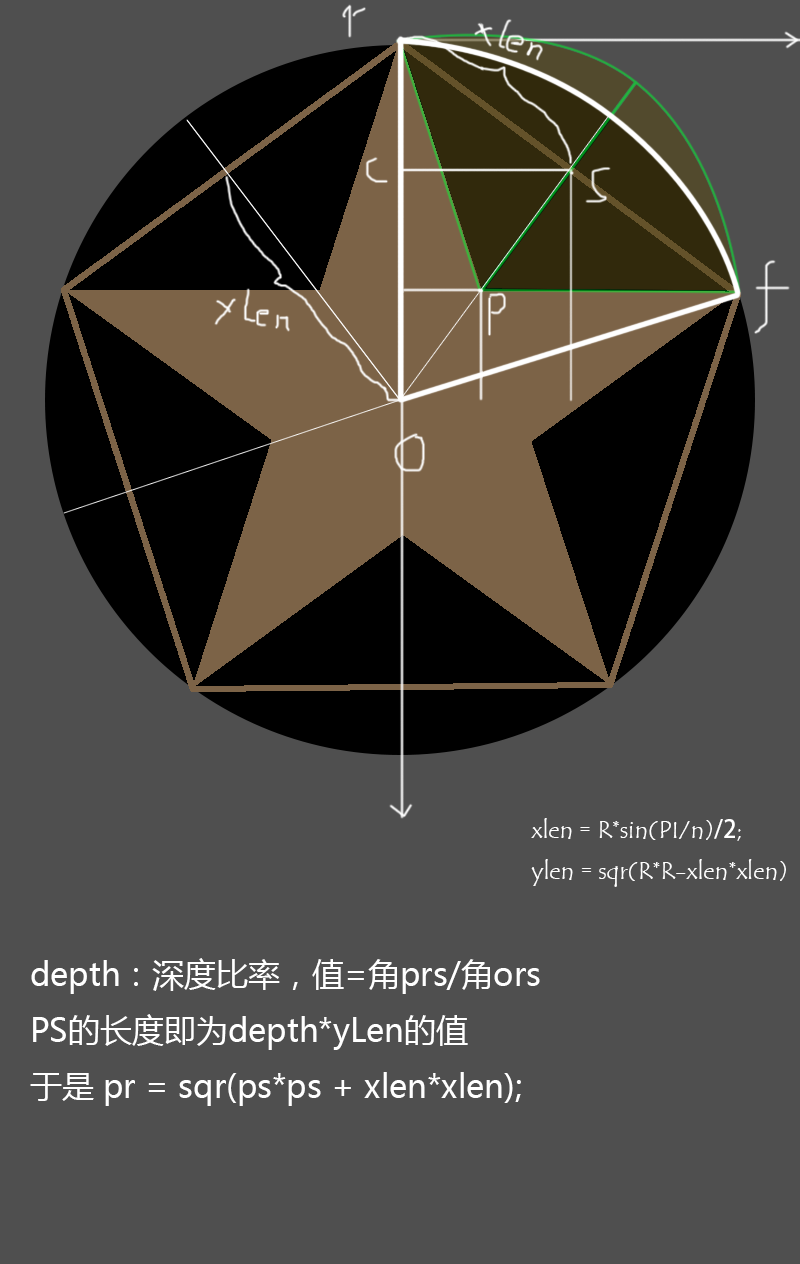
我们需要将正多角星星的每一个顶点坐标计算出来。
并且,我们需要推导出一个公用的坐标公式,这个坐标公式能够表示任意一个正多角星的顶点坐标。
在实现过程中,我曾经通过计算出弧或三角形rpf的面积,接着通过Android的图片模式(Xfermode混合模式),循环一周,旋转固定角度相减而得到正多边形。这么做理论上行的通,实际效果则会导致存在1像素的空白线条间隙。所以,最后采用的办法是计算出所有坐标。
核心代码实现:
public class StarPathUtil {
/**
* 连接路径
*/
public static Path linePath(double r,int hormCount,@FloatRange(from=0,to =1) float depth){
Path starPath = new Path();
double sOrs = Math.PI * (90 - 180.0 / hormCount) / 180;//角arf的弧度
double sPro = (1.0 - depth) * sOrs;//角pra的弧度
double sPrs = depth*sOrs;//角prs的弧度
//圆内接正多边形边长公式2r*sin(180/n);rs = 边长/2
double lRs = r * Math.sin(Math.PI / hormCount);
double pr = lRs/Math.cos(sPrs);
//p点坐标
double pX = pr * Math.sin(sPro);
double pY = pr * Math.cos(sPro);
starPath.moveTo(0,0);
/**
* 已知圆心o(a,b),R(x,y),求R点顺时针移动c弧度后的坐标
* x'=(x-a)cos(-c)-(y-b)sin(-c)+a
* y'=(y-b)cos(-c)+(x-a)sin(-c)+b
*
* 此处坐标非正常坐标,为逆时针旋转,a=0,b=r,故:
* x' = x*cos(c) - (y-r)sin(c)
* y' = (y-r)cos(c) + x*sin(c)+r
*/
//循环求出每旋转c==PI*(360/hormCount)/180弧度后r点和p点的坐标,并构建为路径
for (int i = 0;i<hormCount;i++){
double c = i*2*Math.PI/hormCount;
double sin_c = Math.sin(c);
double cos_c = Math.cos(c);
//r(0,0)>>R(x,y)
float rX2 = (float) (r*sin_c);
float rY2 = (float) (-r*cos_c + r);
//p(pX,pY)>>R(x,y)
float pX2 = (float) (pX*cos_c - (pY - r)*sin_c);
float pY2 = (float) ((pY - r)*cos_c + pX*sin_c +r);
starPath.lineTo(rX2,rY2);
starPath.lineTo(pX2,pY2);
Log.e("测试","r("+rX2+","+rY2+") , p("+pX2+","+pY2+")");
}
starPath.close();
Matrix m = new Matrix();
//旋转角度
// m.setRotate(rotate);
//计算时坐标系平移(r,0),现路径整体平移过去,以符合坐标系。
m.setTranslate((float) r,0);
starPath.transform(m);
return starPath;
}
}
-
这个计算可能存在其他方式,期待能看到其他的算法实现。
-
项目仅仅能跑而已,代码结构等还有待改进。