Each work package is independent of others, and some (in particular QMeteo and Dynamic routing) are of very general interest.
The same approach can be useful in other context, e.g. paragliding (thanks Lene). Add more suggestions.
- load marine charts [check free ones from OpenCPN: https://opencpn.org/OpenCPN/info/chartsource.html e.g. http://www.vnf.fr/ecdis/ecdis.html ; S57 is supported by GDAL]
- create styles for them, see international guidelines: https://www.iho.int/iho_pubs/standard/S-52/PresLib_e3.4_Introduction.pdf and OpenCPN code here: https://github.com/OpenCPN/OpenCPN/blob/master/src/s52cnsy.cpp implementing "conditional symbology"; the code it tightly dependent on the OpenCPN internal data structures, so may be difficult to abstract directly. The basic idea is to walk the table of Features found in the S57 file(s), and draw each item in succession. The S52 spec defines the order of rendering, so that the correct Features appear "on top". There are also display categories, grouping Feature types together to control display content and complexity. etc...
- problem: loading S57 seems to slow down QGIS horribly; possibly patches to GDAL from OpenCPN will solve this
- choose polar for your boat; see sample in this repo (more info http://www.ockam.com/2013/06/03/what-are-polars/)
- define optional variables
- % reduction for night navigation
- % reduction for strong winds
- avoidance of high waves
- minimum sea depth
- etc.
- define start and end points, plus optional intermediate points
- define start time
- download GRIB files (bounding box taken from points above; start date taken from above) [see http://www.zygrib.org/]
 ; notes here: https://nomads.ncdc.noaa.gov/data/gfsanl/IMPORTANT_NOTE ; http used by ZyGrib:
; notes here: https://nomads.ncdc.noaa.gov/data/gfsanl/IMPORTANT_NOTE ; http used by ZyGrib:

data/maps/gshhs/README.gshhs.rangs:http://www.ngdc.noaa.gov/mgg/fliers/93mgg01.html
src/IacReader.h:http://weather.noaa.gov/pub/data/raw/as/asxx21.egrr..txt
src/IacReader.h:http://weather.noaa.gov/pub/data/raw/fs/fsxx21.egrr..txt
src/GribRecord.cpp: // data: http://nomads.ncdc.noaa.gov/data/gfsanl/
src/GribRecord.cpp.orig: // data: http://nomads.ncdc.noaa.gov/data/gfsanl/
- possibly extract the bands of interest:
gdal_translate -b 34 -b 35 -b 36 ECMWF0100_2017030100_000.grb wind.tif - how to download from ECMWF: https://software.ecmwf.int/wiki/display/WEBAPI/Accessing+ECMWF+data+servers+in+batch
- how to download from NASA: https://disc.gsfc.nasa.gov/information/howto/5761bc6a5ad5a18811681bae
- proof of concept plugin: https://github.com/OpenDataHack/qgis-ecmwf-catalogue-plugin
- problem: EPSG code / extent / bands possibly misinterpreted; see https://issues.qgis.org/issues/17219 and http://www.zygrib.org/forum/viewtopic.php?f=3&t=1069&p=3195#p3195
- configure an appropriate visualization (wind speed and direction, wave height and direction)
- problem: find which bands convey the necessary info
- problem: GRIB is loaded as a raster; not trivial to add wind direction and speed arrows, possibly a raster to vector conversion is necessary QMeteo
- specific menu with a preloaded dataset of the world to allow users to make a direct bbox of the place of interest
- extracting bands of meteorological interest and use styles to make weather forecasts (using also the autorefreshing system)
- also tides must be downloaded and taken into account for cosatal navigations; currents for open sea (thanks Jeorge)
- note: some of these things are partially implemented in Crayfish https://www.lutraconsulting.co.uk/products/crayfish/; its porting to QGIS core would make things easier
- calculate optimal route
- a description of possible approaches here: http://web.abo.fi/fak/tkf/at/ose/doc/Pres_15112013/Mikael%20Nyberg.pdf and https://www.researchgate.net/publication/280105634_Routing_and_course_control_of_an_autonomous_sailboat; on global planning level should be possible to use existing algorithms like A* or Dijkstra. But as in the sea there are no "roads" and we can move in any direction it is necessary to prepare data (nodes and edges) for these algorithms. Probabilistic roadmap algorithms will work better as they don't need explicit edge-to-node connection. This would probably have to be implemented from scratch as a new QGIS alg. Also for the local planning stage seems a custom algorithm need to be developed
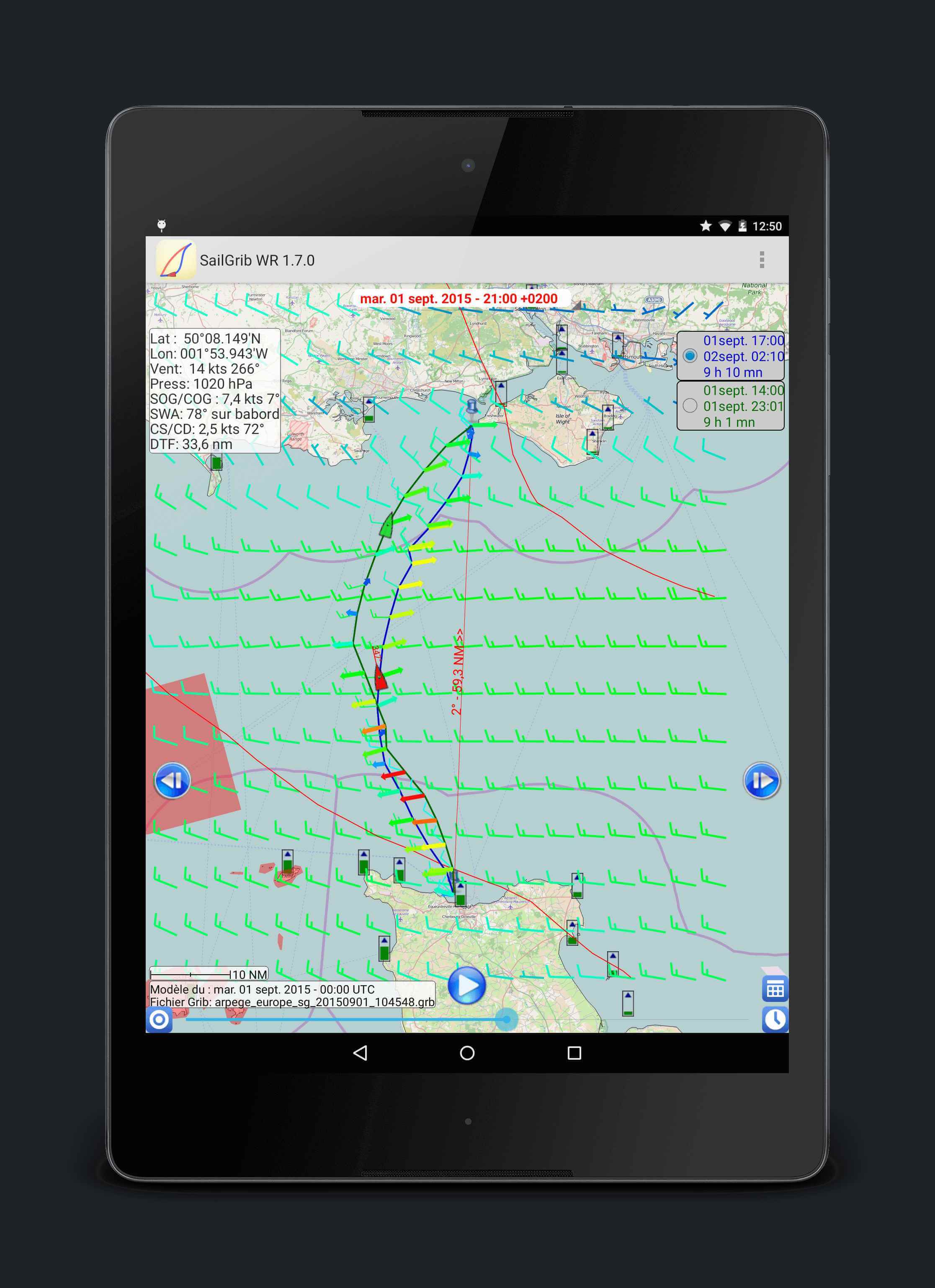
- examples: [see https://www.sailgrib.com/], e.g. https://www.sailgrib.com/wp-content/uploads/2014/12/device-2015-09-01-125050_framed_tiny.jpg
- add the result as a temporary layer
- avoid land masses from WP#1
- avoid other undesirable areas (e.g. crossing traffic corridors at right angles)
{kind=link}
- communicate with autopilot to set the helm
- protocol NMEA2000 https://www.nmea.org/content/nmea_standards/nmea_2000_ed3_10.asp
- QtQuick https://doc.qt.io/qt-5/qtquick-index.html
- Qfield http://www.qfield.org/